Branching this topic before it takes over the SimpleFOC-StepMini thread.
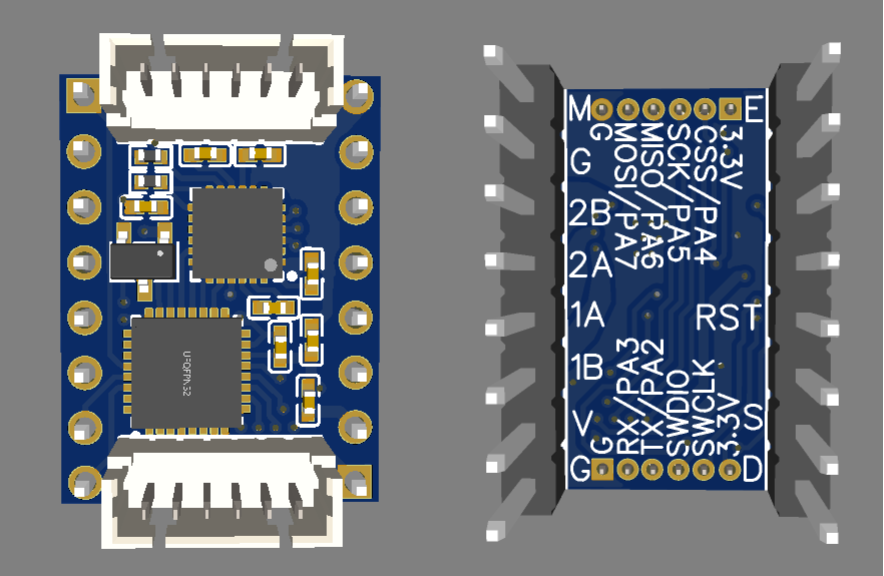
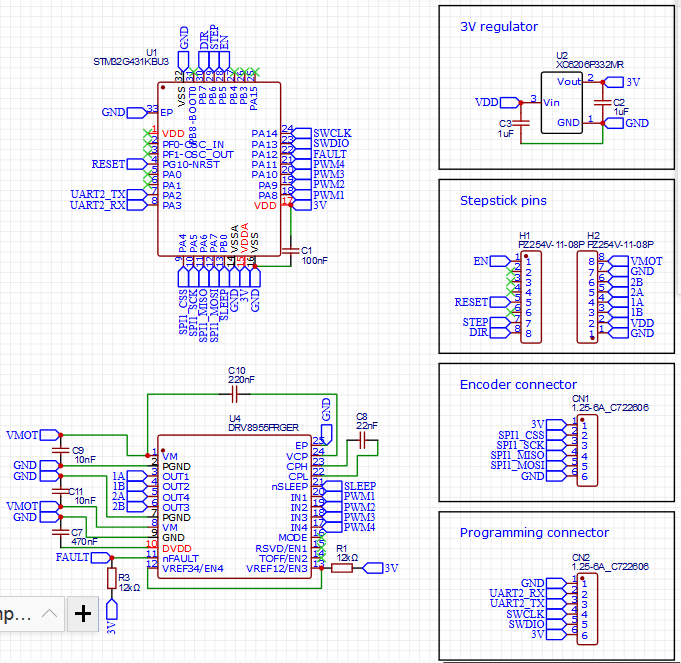
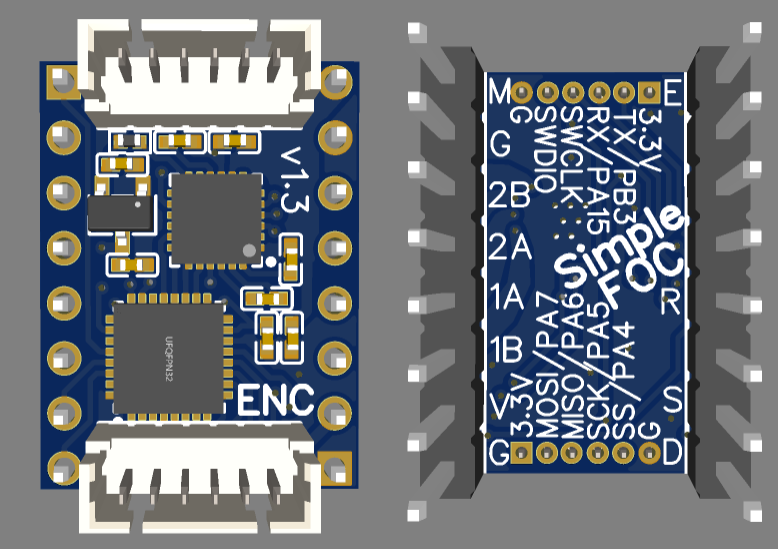
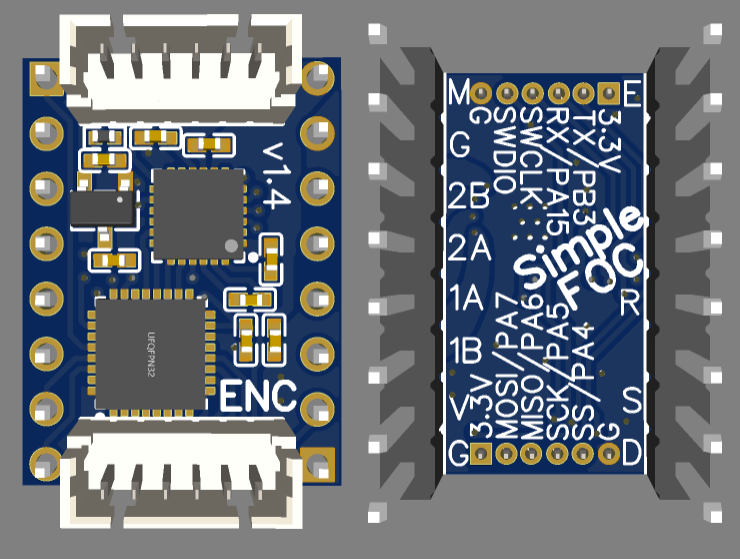
Yeah, I’d like to keep the cost as low as possible. That is helpful if we only need an encoder connector, but I may try for both anyway, or at least a 3 pin UART interface (RX, TX, GND) that can be connected while it’s plugged into the motherboard. It wouldn’t be too bad having to pull it out to flash the firmware, but I’d like to be able to configure the PID, KV, phase resistance, and other values while it’s powered by the printer so people don’t need to buy a standalone power supply to use it.
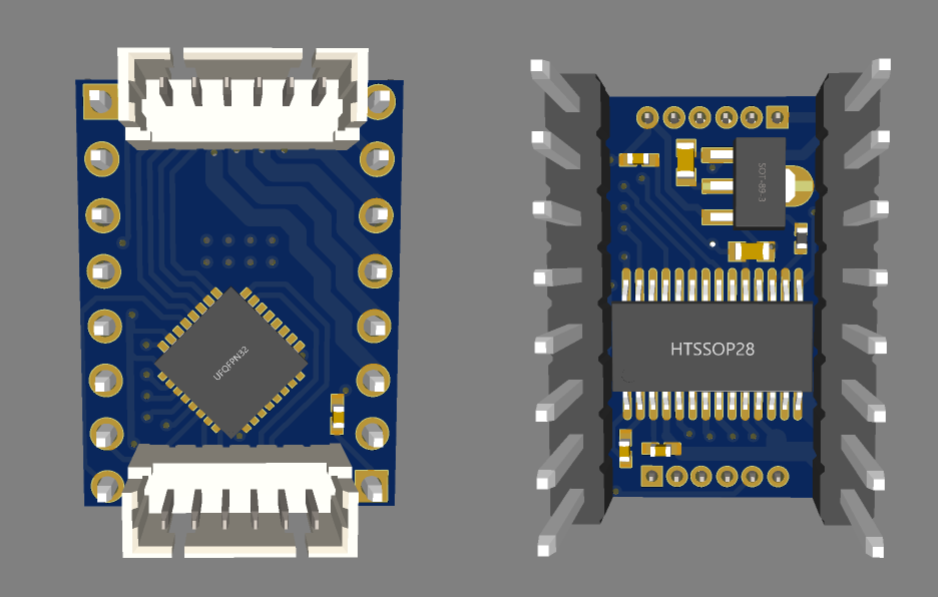
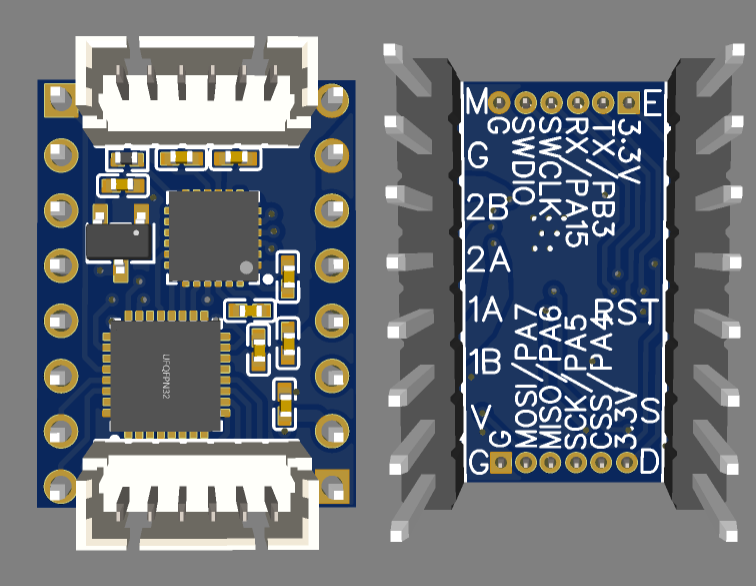
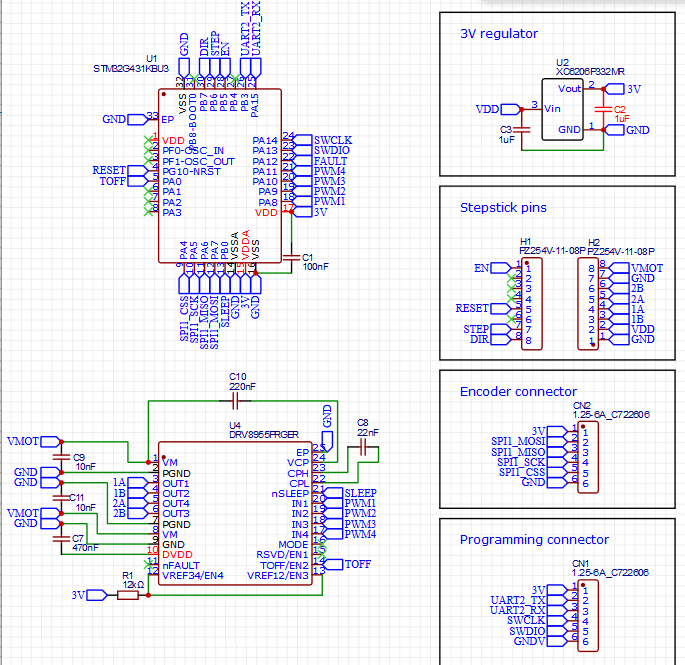
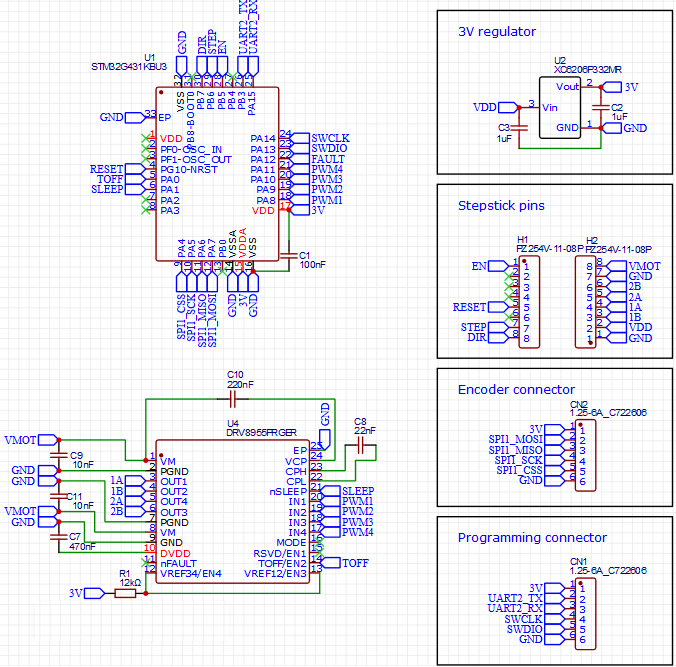
I had originally planned on making it BLDC-only with DRV8313, but these 4 half-bridge chips should make it usable for both. I’m torn between using STM32G031 for its low cost and small size, or G431 for its better performance and large flash space. I don’t think we really need the performance, but the flash would allow use of the full Commander interface rather than a custom stripped down version like I usually do. And it could be sold with a pre-installed firmware including the BLDCMotor, StepperMotor, and all the sensor classes so it can be configured for all sorts of setups with only an FTDI adapter.
Reply to another post from the other thread:
No, it also needs an onboard MCU to read the encoder and run SimpleFOC. The motherboard just sends step/dir signals, it doesn’t receive any feedback.
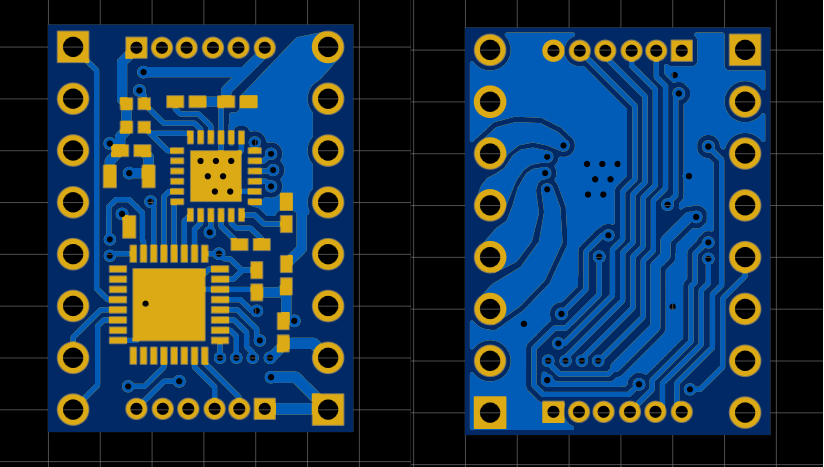
I haven’t seen any closed loop projects that are a drop-in replacement for the stepstick footprint. I agree it is getting a bit outdated, but the only competing format I’ve seen is BigTreeTech’s EZ driver, which is like a classic PC expansion card slot. That does allow for larger driver boards, but it hasn’t been around long enough to see if it will catch on.