That’s a really nice idea… I was thinking along the same lines myself ![]()
The problem with going so small (as you well know, I guess) is the vias. As a HDI design I think it would not be a problem going down even to 10x14mm, but with through hole vias its a real challenge to fit everything. For me, making HDI boards for hobby purposes for myself is still too expensive.
Regarding the programming/debugging connector, it seems there is a certain amount of optionality to the module’s pinout:
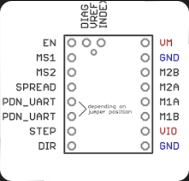

So I guess MS1-MS3 and RESET/SLEEP can be repurposed? And at least if it were a BLDC-stepstick then one of the outputs would be free too ![]()
It would probably depend on the master MCU firmware too whether it would work in-situ…