Hey there! I’m rather new to BLDC motors and FOC control, but would like to build a relatively low cost (ideally < $1000) quadruped robot with 12 DOF or 3 actuators per leg, similar to Aaed Musa’s TOPS. Since I want to keep the costs low, using gimbal motors seems like a good option. Additionally the driver boards are cheaper since they don’t have to handle currents above 5A.
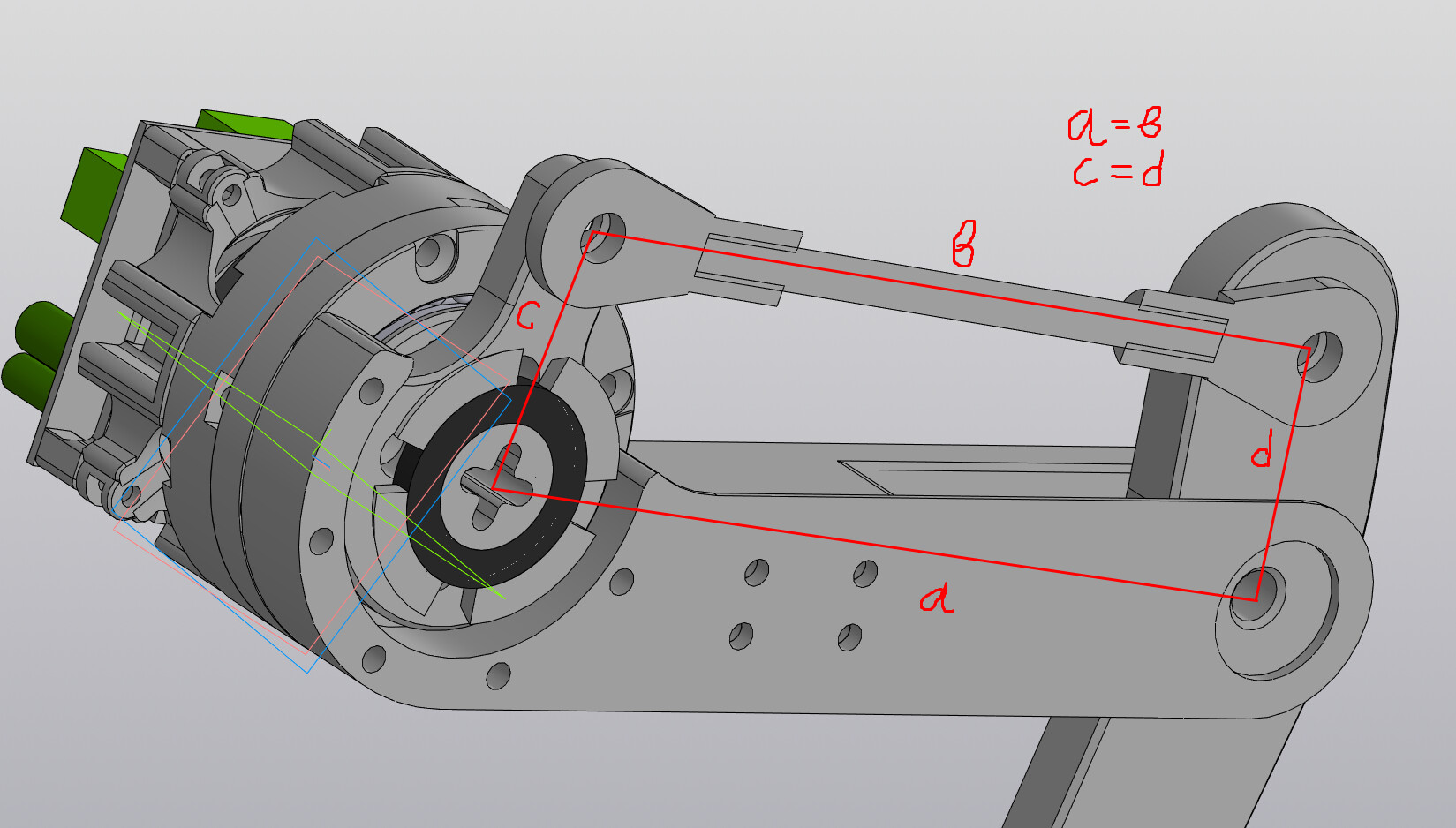
Ideally, the actuator would have a torque around 2Nm and a max speed of ~120-140rpm. I’m planning on using a cycloidal drive to adjust the torque and speed accordingly.
I selected two potential gimbal motors and did some rough torque calculations based off the equations by @CarlesberghStijn in this thread.
Opt. 1: Rctimer 5010 90KV 150T Gimbal Brushless Motor
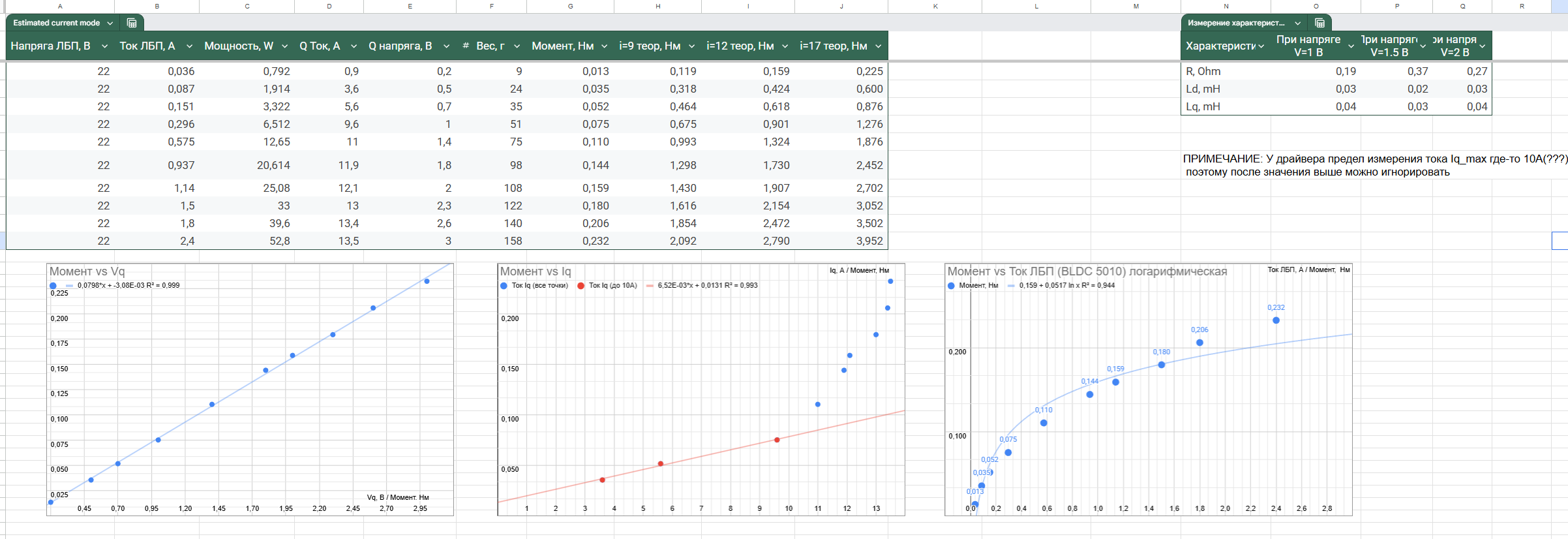
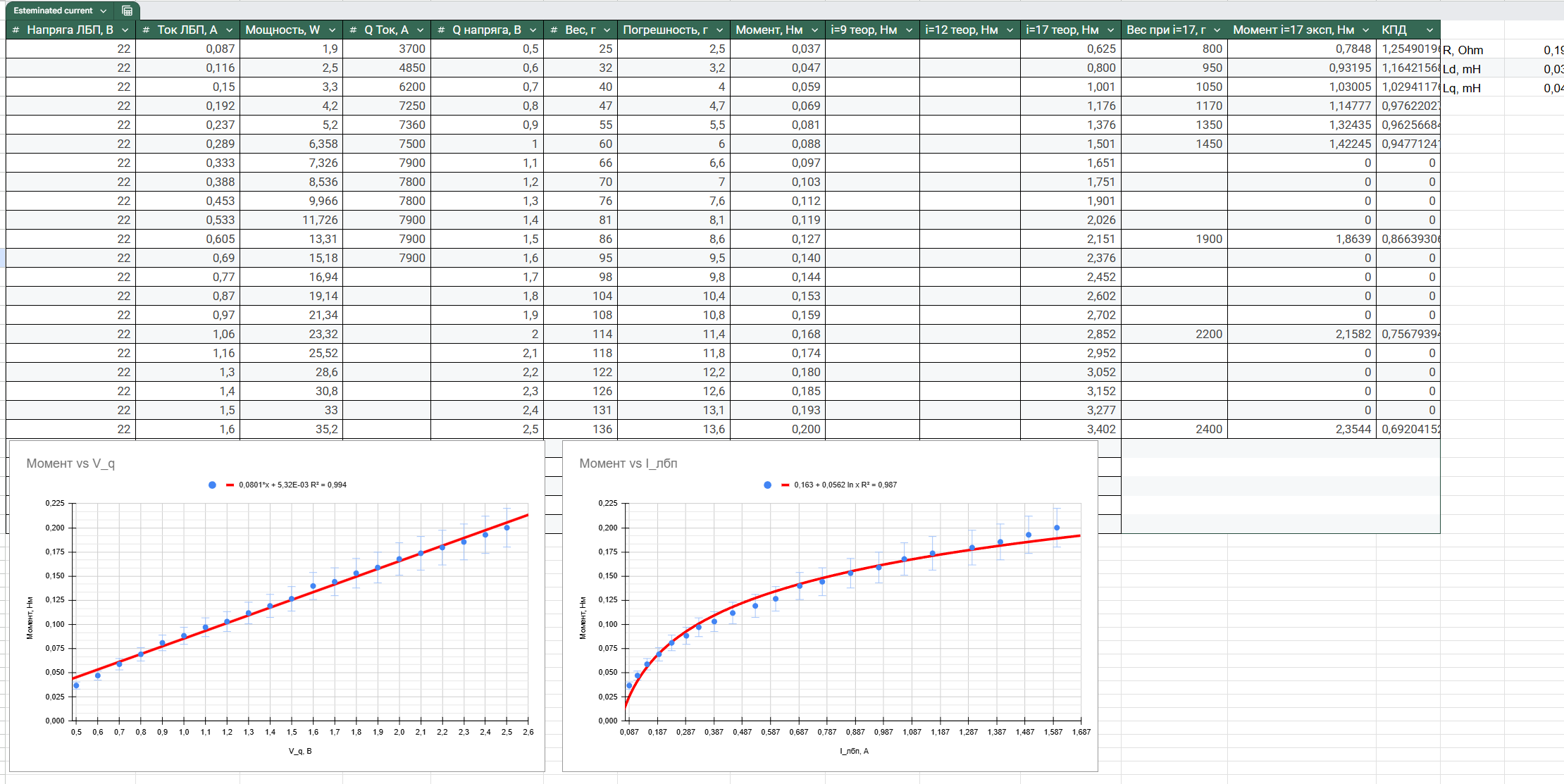
With an internal resistance of 14.65Ω, the motor would theoretically get 1.09A at 16V and 1.64A at 24V at max. This would result in a torque of 0.1Nm (16V) or 0.151Nm (24V). At 24V, I could theoretically use a 16:1 gear ratio to get to 2.416Nm and a max speed of 135rpm (24V*90KV/16 = 2160rpm/16 = 135rpm).
But if I understand this thread correctly, the actual current will likely not be above 1A, right? Then the torque would only be around 0.092Nm, therefore the 2Nm & 120rpm goal cannot be met.
Opt. 2: GBM4114 Gimbal Brushless Motor 100T
This motor would provide even more torque at 24V (~0.408Nm), and if the 32KV is correct, a 6:1 ratio could be used to achieve 2.45Nm & 128rpm (again, only theoretically, without accounting for gearbox friction and other losses). I assume that the actual current at 24V is probably lower due to the same effect that is apparently present in option 1.
Since I don’t have a lot of experience and I don’t want to order every motor and test the behavior, I hope there are a few people who can answer these questions:
- Are my estimations above somewhat realistic? If not, what am I missing?
- In general: I know that gimbal motors have been used for robot arms, but is it likely that they will do well in a quadruped (e.g., strength/weight ratio)?
- Unfortunately, the RCTimer motors do not have any information about the continuous current they can handle. I’m concerned that the gimbal motors will get too hot way too fast if used in the actuator. Is there a rule of thumb for gimbal motors, or do I need to test it individually?
If you have another idea of how to achieve the desired specs for the actuator that does not include gimbal motors, please share. I’m open to other options, but please consider that the goal is to keep the costs below $1000, therefore a single actuator should not be above $60-70, since I’ll need 12.
Thanks in advance,
Till