Hey guys, I want to introduce the quadruped robot driven by simplefoc. All the schematics will be open source sooner,including the CAD files for the robot , the pcb files for esp32-simplefoc-board (supporting 2 motors) etc.
The results show that simplefoc is good enough to control the four-legged robot.
I am not the author.
We are in a group focusing on designing and building quadruped robots. And the robot is just an experimental machine to verify the implementation.
More dogs are coming!
The information about this dog and Simplefoc based FOC driver. I will open source on this GitHub later.
Now my GitHub is in Chinese, and I will start translating my GitHub into English in the next few months.On my GitHub, I also open source a quadruped robot based on servo…Welcome to join this project and make your own quadruped robot.
All the latest video about my robot and FOC driver will be posted on my website:灯哥开源的个人空间-灯哥开源个人主页-哔哩哔哩视频
This was a good sample for me. I’m working on the simplefoc driver for quadruped, too. I had done it with rc servos before and started V2, but that way they can’t be precision and torque enough and the servos started burning one by one in v2, so it was garbage. Finally I decided to do it with a brushless servo.
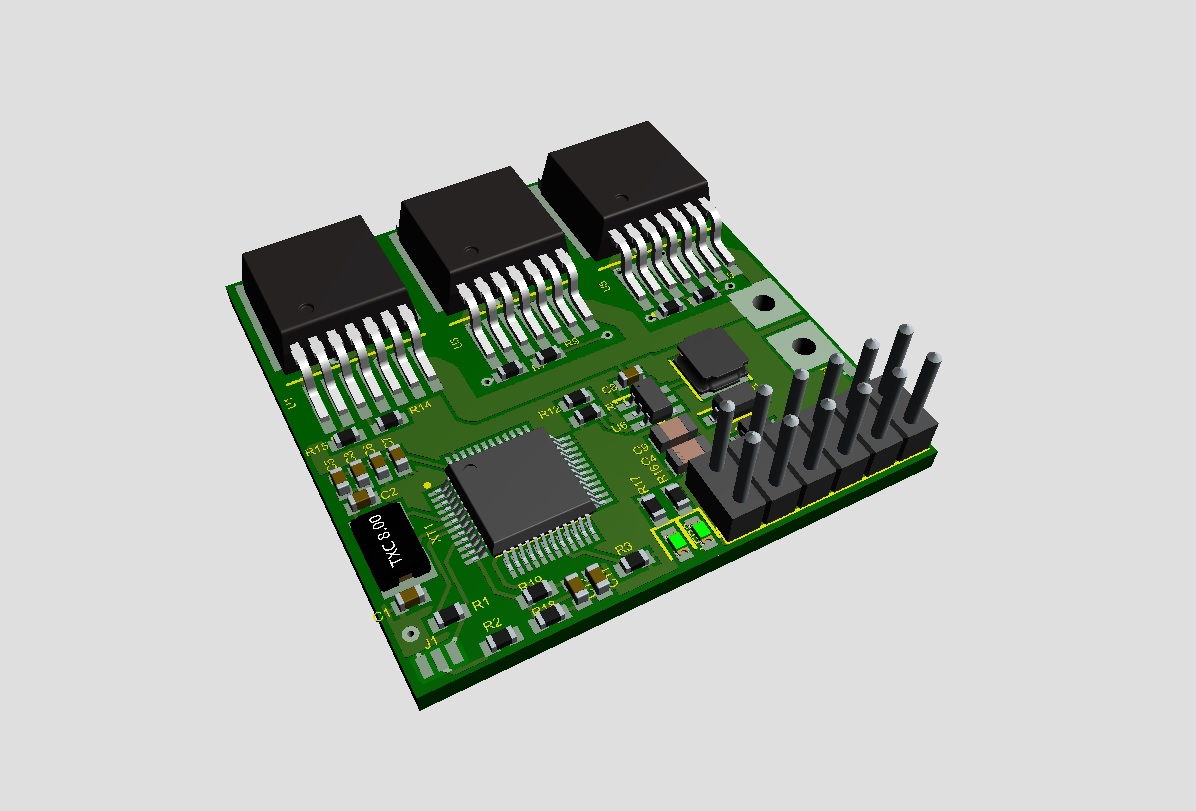
I’m working on this board, stm32f103+btn8982, 36x36mm.
Yes, I used the simplefoc Library in my FOC hardware, but I made some modifications to the library to adapt to my application, including serial control protocol, torque control and some other minor changes
Now I’m designing a new version of open source quadruped robot based on simplefoc library and my own FOC hardware. Later I will open source on my GitHub when I finish.This is part of my design: