Hi all!
I am new and interested in building a quadruped walking robot. It’s a project for a university science club, and we have a certain budget. Additionally, we already have some equipment from previous projects to start with:
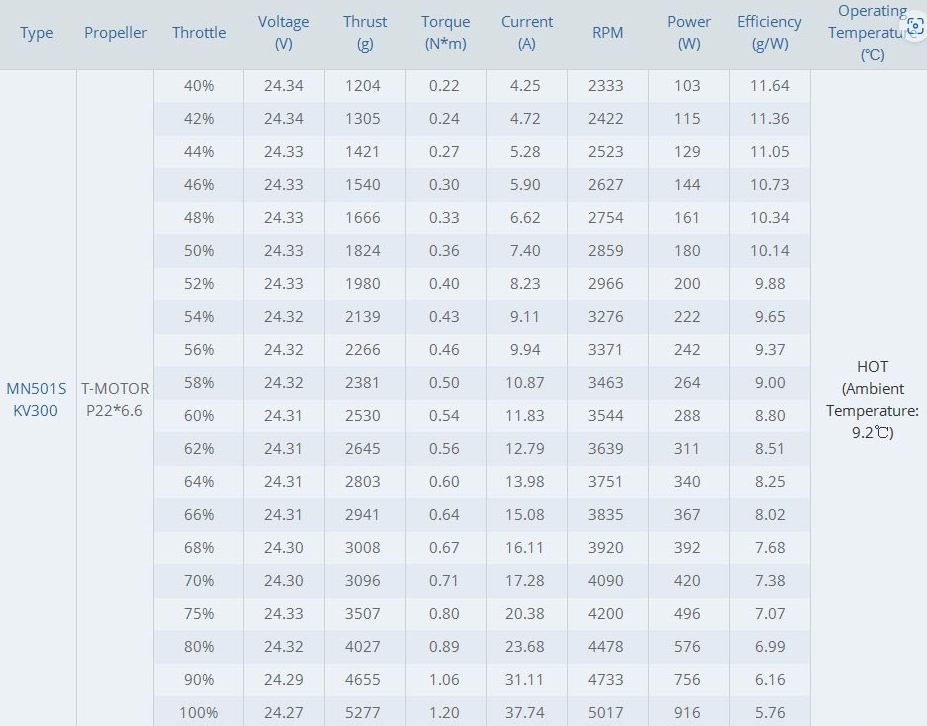
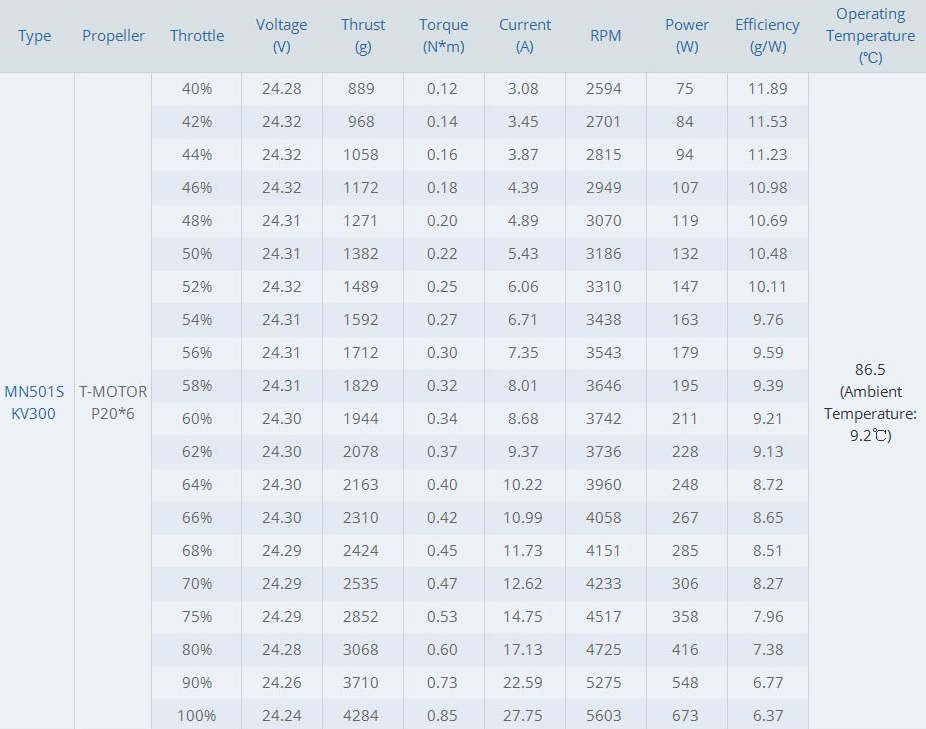
-6 x BLDC Motor MN501-S KV300
-3 x ODrive v3.4 (one driver handles 2 motors)
-5 x AMT102-V Encoders (for testing purposes only; planning to use magnetic encoders, e.g. AS5048A, as we already have one)
-Several power resistors
-Various laboratory power supplies and a 6S 4000mAh Li-Po battery
-Debix Model A with 2GB RAM (includes CAN, but we are considering a switch to Raspberry Pi)
What we plan to do:
- Creating a quadruped walking robot utilizing 12 motors (alternatively 8)
- Constructing the frame using 3D printing for both gears and robot housing
- Implementing closed-loop control for precise motion control using magnetic encoders
- We are considering a change in ODrive controllers since the new v3.6 models are expensive, and we don’t have a sufficient quantity. Moreover, we already have the older versions 3.4.
I need advice to start; is it worth considering using b-g431_esc1 controllers in the project?
MN501-S motors operate at 24V with a peak current just under 40A, so cooling systems will be necessary. The current of 40A may occur in the case of heated motors; however, is it worth considering different motors due to such high currents?
Thanks!