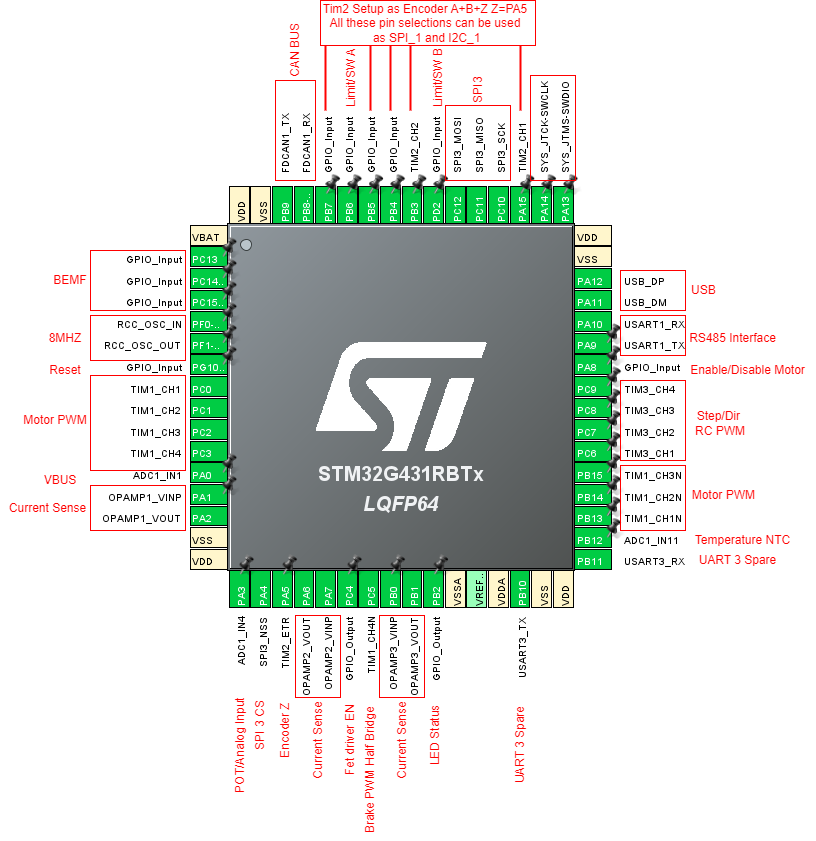
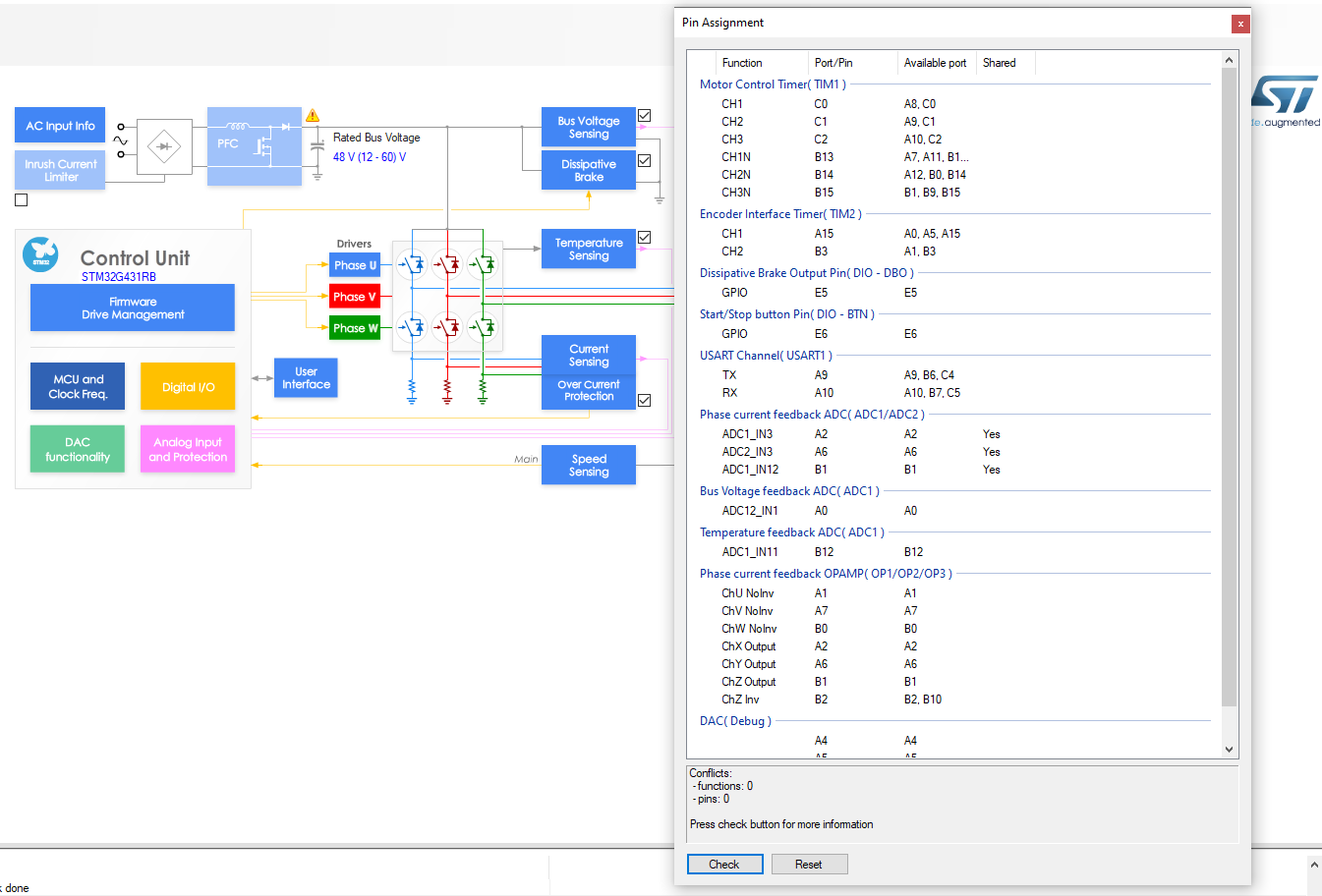
I’m looking at designing a custom board using the 64 pin variant of the G431 which will support up to 80V Input and 30A, something comparable with the ODrive. I will be mainly using 48VDC Motors but would like to try some 80V larger motors. The prototype I may support up to 50v to help with costs. I am trying to figure out a suitable pin configuration. I would like to use the onboard USB but this moves the Tim1 pins to different pins. Also I can’t move the CAN pins and one is shared with the boot select pins. I did read some posts about the 100 pin version and a lot of pins were left un used. How hard is it to get a prototype up and running with Arduino and PlatformIO using generic MCU? I see the RB board is supported in the arduino stm32 core. Here is the layout I have been mucking around with STM32 Cube IDE. I can’t workout how to correctly configure Timer1
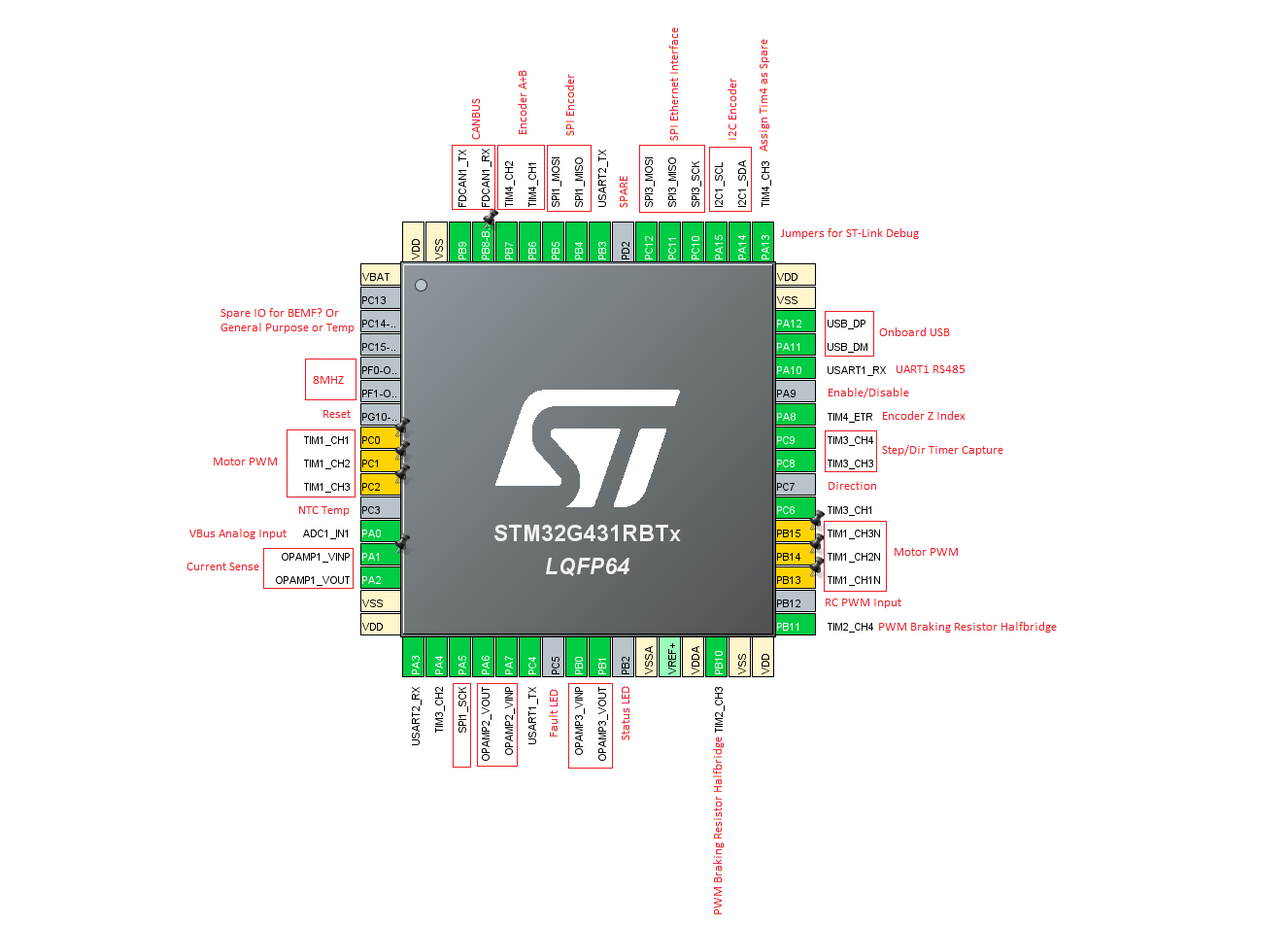
If you have any better pin selections I should use I will change to suit. Is the BEMF detection needed at all or a good to have for future support when simpleFOC supports BEMF? I may move I2C to leave the ST-Link pins free. I did read there is some issues getting the USB to work correctly to upload code? I’m hoping it’s not to much work to get working since there is already arduino support for this MCU




{kind=link}