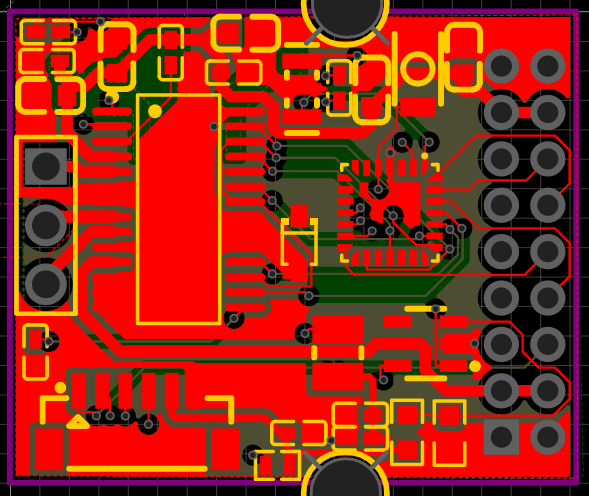
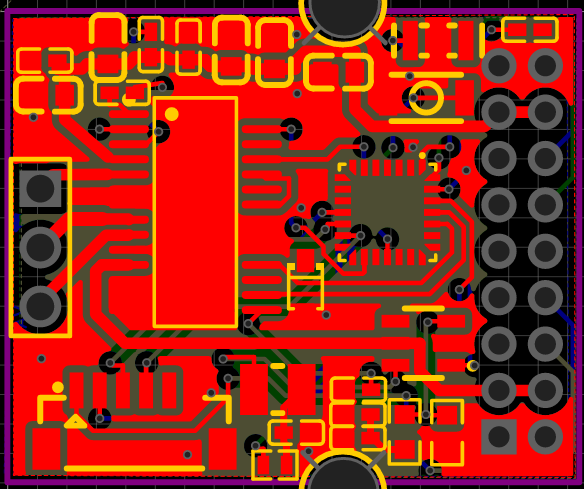
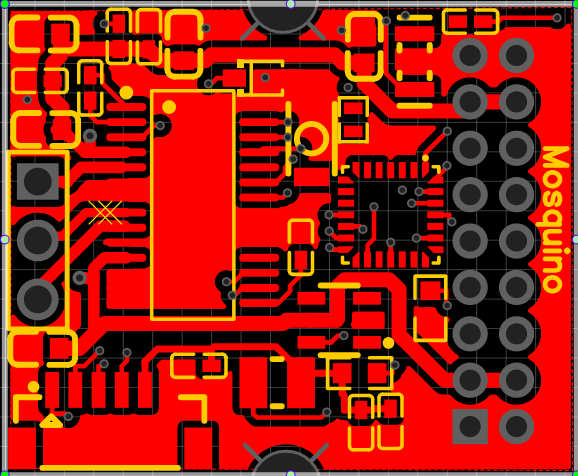
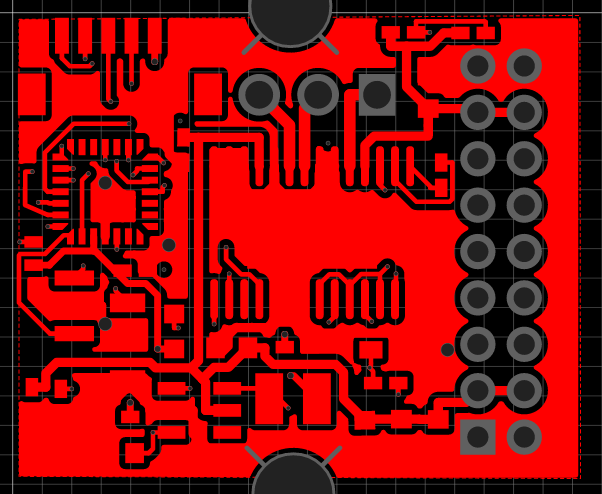
Your copper tolerance gap is too high. Set it to solid 150 microns. Also strategically place ground vias to connect to the bottom and form a single ground path. Let me know if you need step by step guidance. Also your traces are way too thin, etc, you definitely need work but one at a time. Also you are routing a power trace under the power inductor that’s a big no no, etc. etc.
It’s better. Remove any traces under the inductor. Also one of the traces of the driver is kinda touching the other next lead, 4-th right from the top. Make sure you run DRC checks all the time.
I’m still getting 73 DRC violations. Please clear those, clearances and incomplete connections. That’s way to many for me to resolve, I need to rework the entire board from scratch.
If you are unsure, there are educational videos you could watch on EasyEDA.
You need to get some hands-on self-training before you spend any money on manufacturing a board.
I can help, but cannot provide you with basic CAD/EDA training, not with this type of problems.
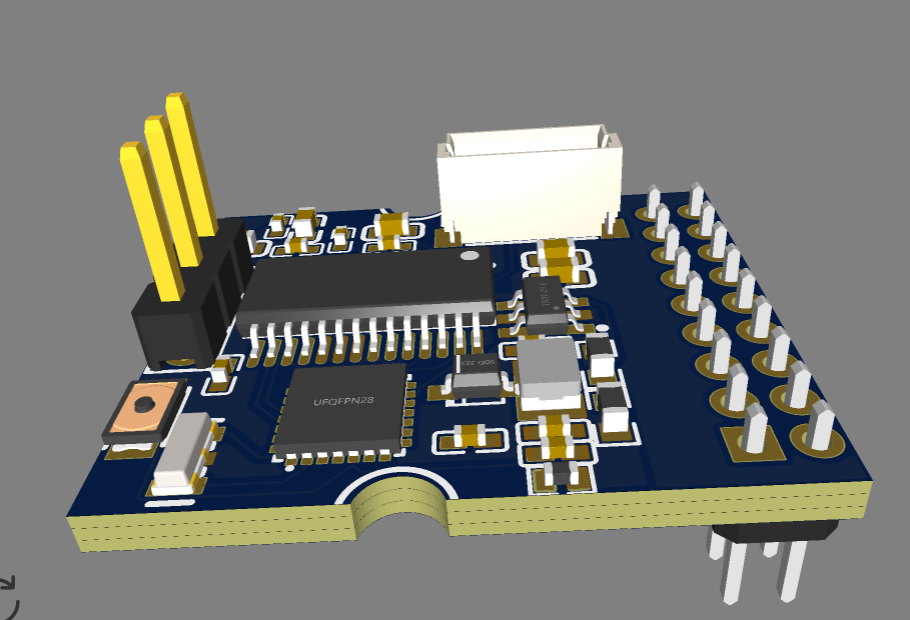
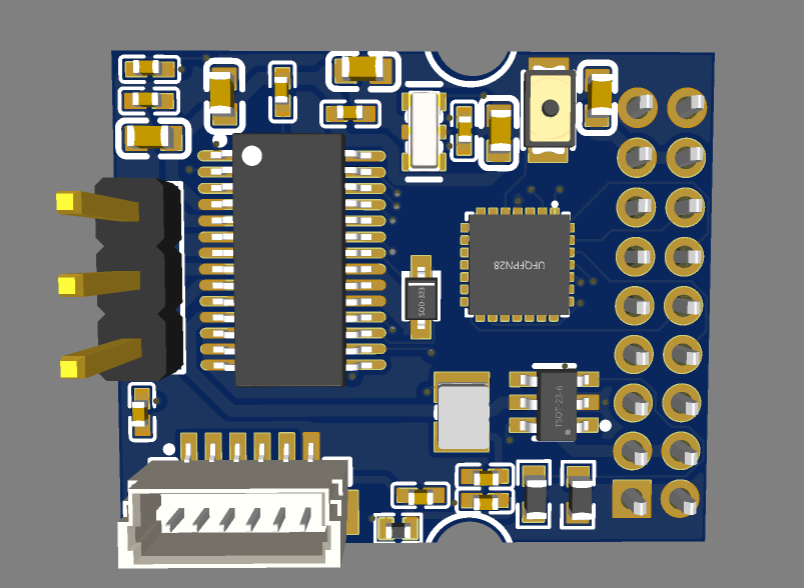
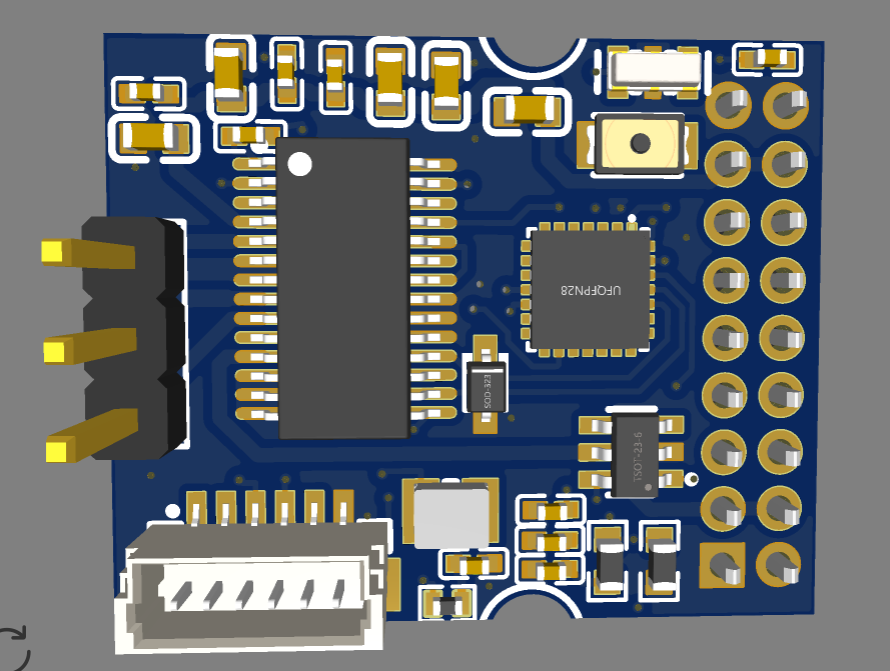
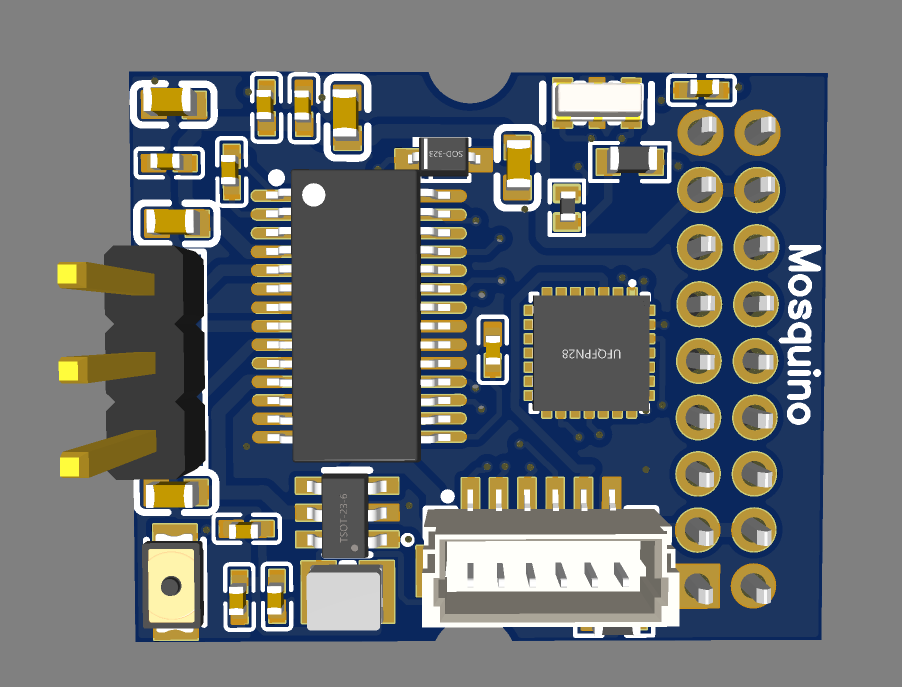
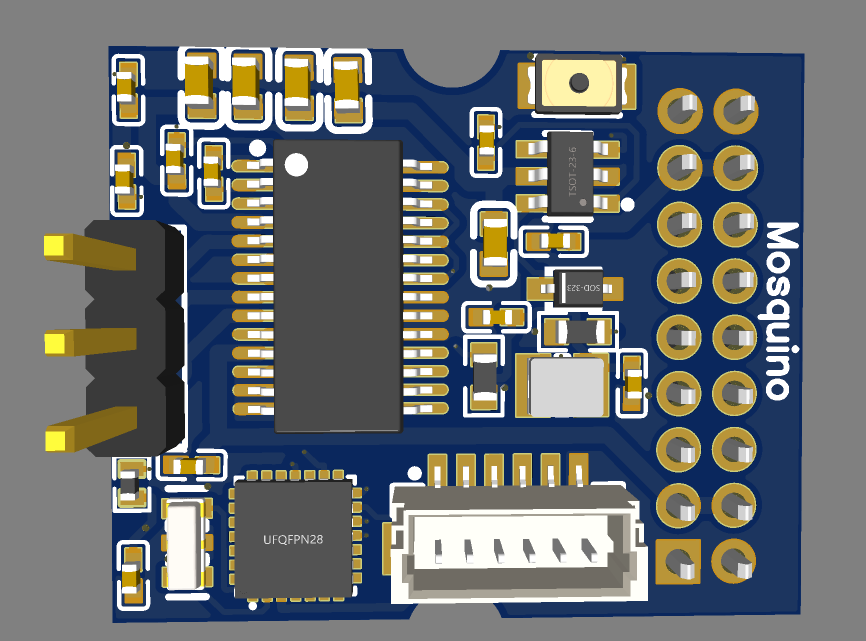
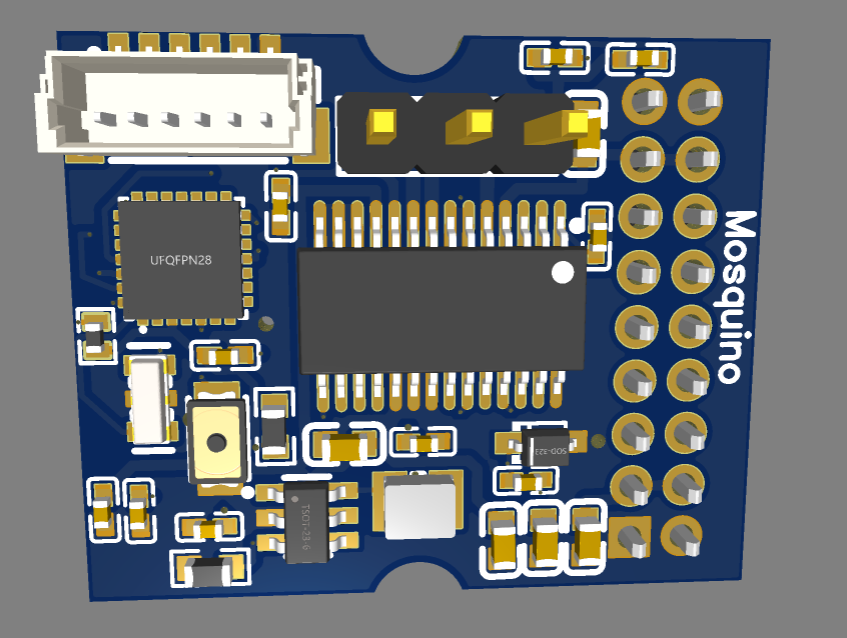
I had a better look at the board. You need to completely rearrange it. The mcu is too far from the crystal and decoupling capacitors. Please read documentation acout mcu layout.
Two sided board may be needed to fit what you want.
The oscillator seems OK though the traces are non symmetrical but the frequency is not too high so you will be fine. The buffer and decoupling capacitors are still too far. They need not only need to be physically next to the pins they decouple MCU but to be connected with direct traces.