Okay, I’m sure you guys are wondering why we keep asking about high rpm especially in the 300 kV range Most of us are working on long-range drones. The primary reason we keep hounding guys is due to a lack of high-voltage, low-amp ESCs aka, we need to work within the 25v-38v range at 0.5ah-1.5ah there are no esc that work within this range efficiently so due to this, we settle for 20ah esc, which are really inefficient we lose 200-300% because we are only using 5%-15% throttle instead of the normal 20%
Now, at the moment, I can get 24 grams per watts of thrust per watt. Most of my power losses are from ESCs, and at 34 grams per watt, it gets to the point with RC planes that we are actually having a stack of motors than it is to increase battery size, meaning with the right ratio of belt drive at 99% efficiency and stack running within the rpm range to lower back EMF. The wattmeter reads 44 grams per watt minus 20%, assuming I can get normal power losses from esc or foc
the outcome
Example 300 Wh/kg battery lets say you run 1.5kg glider whats better 300 watts = 1000g battery weight and a 50g motor that’s chewing 60 watts, making about 500g of thrust 5 hours runtime or glider of 1.5kg with a battery of 225 watts = 750g and stack of five motors 250g achieving 15w x 34 g/w = 510g of thrust with a runtime of 15 hours
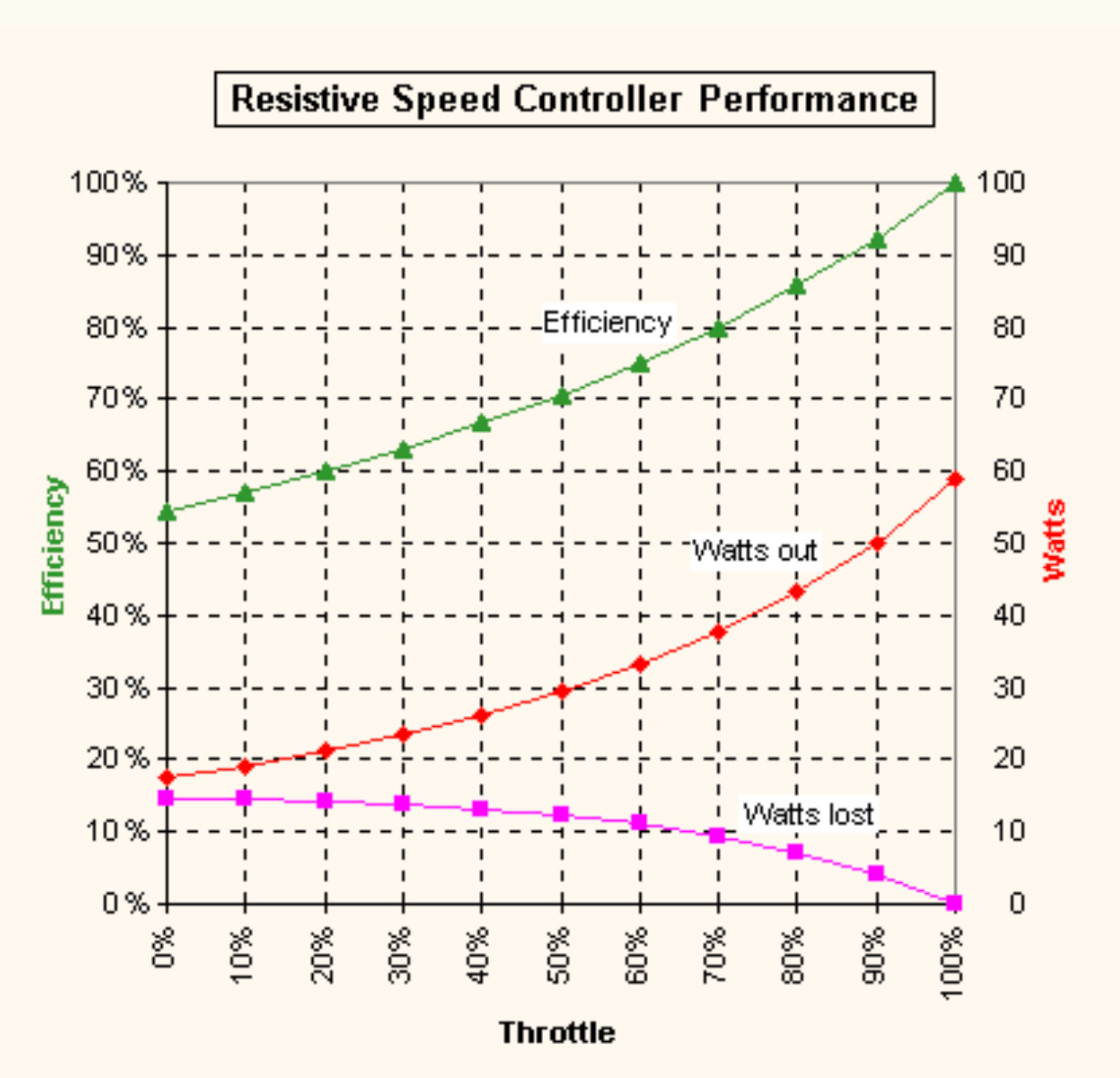
Getting to the point of 34 grams per watt = unlimited range overnight solar plane. Now I know i am supposed to lose a bit power with esc but due to the low throttle, i am losing more than I should a lot more refer to image 1
Now the motor runs more efficiently at higher voltages The primary issue is that FOC is better suited to a voltage and amperage range than a ESC. that being said, how do I achieve this while minimising power waste
I need the best encoder for high rpm (1500 rpm-3000 rpm). also any issues i might run into
Does this run closed loop and open loop or just closed loop based on the wiring diagram? I only see closed loop ones, given the nature of what you’re using it for is robotics. I understand why you would not need to ask. if it’s only closed loop, I will need a sensor, probably a as5048a because of the higher speeds also if it does run both, is there a major efficiency difference between closed loop and open loop at higher speeds If so, keep in mind that based on the only data point I have of a similar motor, I have to assume that he was using a FOC device that was oversized, resulting in a similar throttle issue to the one I have with ESC, aka the FOC board was too big for the motor, given they do a very similar thing to an ESC in a different way. thats fine because this FOC is rated for 1a continuous use and 2.5a peak and the right voltage or two foc are very inefficient at high speeds or three user errors
Ideally i need someone with a 300-600 kV motor that’s running at 50%-80% of the FOC’s boards max wattage at high rpm (1500 rpm-3000rpm) I would need readings from a wattmeter after the FOC and before the FOC.
in the end I am only using a foc because esc suck in terms sizing for long glider they use extremely small amounts of power
SimpleFOC Mini is just a driver board. You need a separate microcontroller to send PWM signals to it, and together with a position sensor you can create a closed loop system.
It doesn’t have current sense, so you will have to use voltage-based current limiting to reach high speed. That uses the measured rotor speed to estimate the back EMF and apply more voltage to counter it. It will probably be safe enough for flying, especially since DRV8313 has overcurrent protection. If your propeller hits an obstruction and stops instantly, you’ll get a pulse of high current that will probably trip the protection and shut it down, but your microcontroller can monitor the fault pin and reset the driver to try again. But you can probably achieve higher efficiency with current sense.
Another advantage of current sense is that you could try the flux observer. It uses the current sensors to interpret the rotor position, so you don’t need anything on the motor. I would be curious to see how its efficiency compares to using a position sensor.
I understand I have to use a microcontroller also with a close loop what are the efficiency gains I noticed a lot of people that are just using open loop and getting relatively high rpm based on my needs if I’m losing single digit percentages of power powering the sensor might not be worth it
Also the current sense you mentioned is it a factor of the foc mini doesn’t have it or is it a factor of it has to be paired with the right micro control like an esp32 instead Arduino the problem being I struggled to find this board as I said before I’m worried that using a board at a larger size at lower throttle will result in similar inefficiencies that I get with escs as they operate very similar ideally I want to use the board at about within its continuous operating range
FOC Mini doesn’t have it, and it’s generally impractical to add as a separate component. But you certainly could try without current sense and see how it does.
I don’t know if there are any readily available micro size boards with current sense. You could check with @rambros if he has any extras of his DRV8316 board you could buy.
I’m also plotting a design with MAX22213 and STM32G431KBU3 which is in the right ballpark.