Hello everyone,
I am completely new to Arduino and even more so to motors. I have a few questions and hopefully this is the appropriate venue.
This is a list of the hardware that I am working with:
Arduino:
ELEGOO MEGA R3 Board ATmega 2560
SimpleFOC Board:
Makerbase SimpleFOC Shield V2.0.4 FOC BLDC Motor Controller Board Arduino Servo
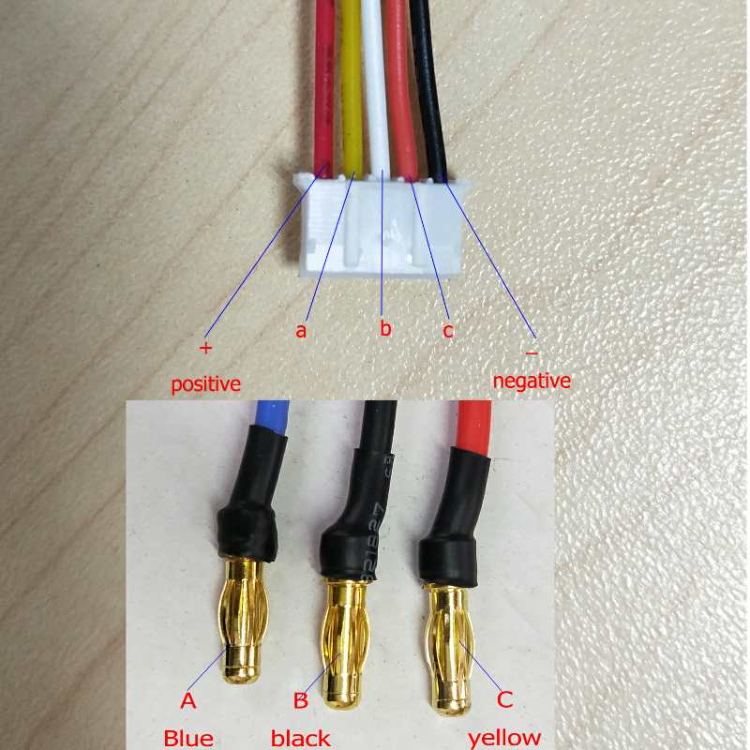
Motor:
https://www.amazon.com/dp/B07PNMYHFT?ref=ppx_yo2ov_dt_b_product_details&th=1
I purchased the above shield and it appears to me that you can just squish it onto the mega which leads to the first question. Is this connection method appropriate? My intuition goes like this: the labels on the silkscreens of both boards line up and seems like it would be fine. Is this the case?
The next question(s) is about where to connect the sensors to the shield. I did some looking around and came to realize that there are many types of hall sensors and they can be analog or digital. I did watch this video: https://www.youtube.com/watch?v=q4BkhwoGzbM and if I understood it correctly I can apply 5v and connect ground to check if the sensor resistance is in a center region around 2.5v which would likely mean it is an analog sensor and it would be connected to a different region on the mega/shield. If it is around 0v or 5v it would indicate it is digital and would need to be connected to a different area on the shield. Is this a good way to see if this motor uses digital or analog sensors?
I think that is it for now. I hope that this is clear and if not I will try to clarify.
Thank you to anyone who helps



{kind=link}