My integration of this magnetic sensor works but is a little “too big”… So starting from @Franz_Schmidt’s idea I have tried something else ![]() reverse the idea to glue the sensor on the bub → glue it on the shaft
reverse the idea to glue the sensor on the bub → glue it on the shaft ![]()
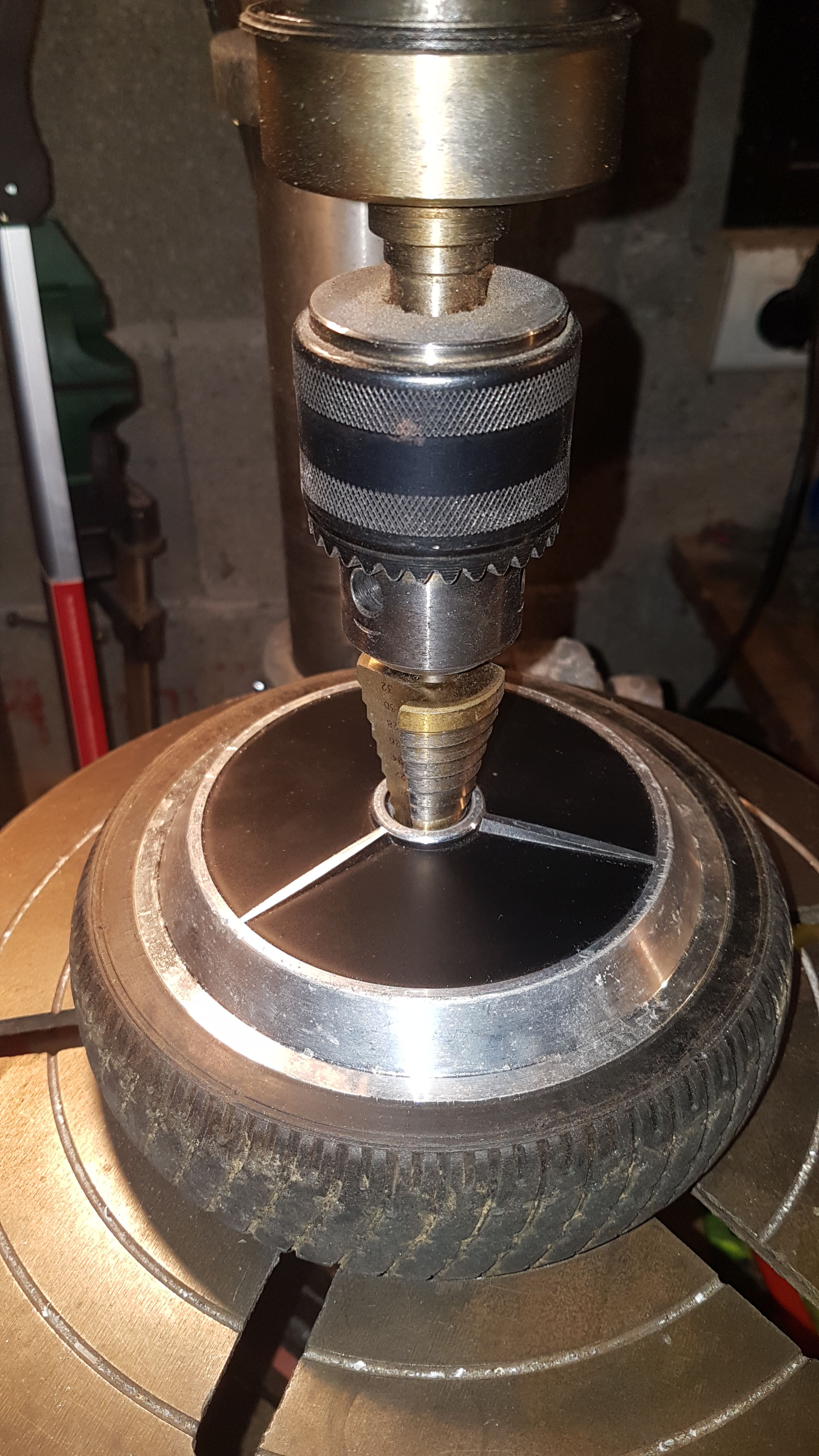
- drill the motor shaft so that you get a “pipe” into which can go the motors wires as well as the sensor’s ones (6 wires for AMS sensor)
- drill the outrunner bell so that you can see the shaft
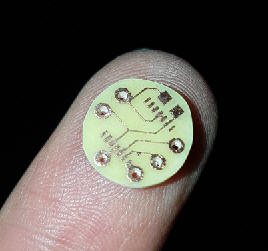
- design a small pcb on which you will have the difficult task to solder AMS sensor and 6 wires
- glue this on top of the shaft (which is fixed into the bearings)
- then (easy part) design a small cover to fix the magnet on the rotating bell



And here is the result (almost) done !
Still have to solder all this (when AS5147U will come)
and then the tests with simpleFoc library ![]()
JP