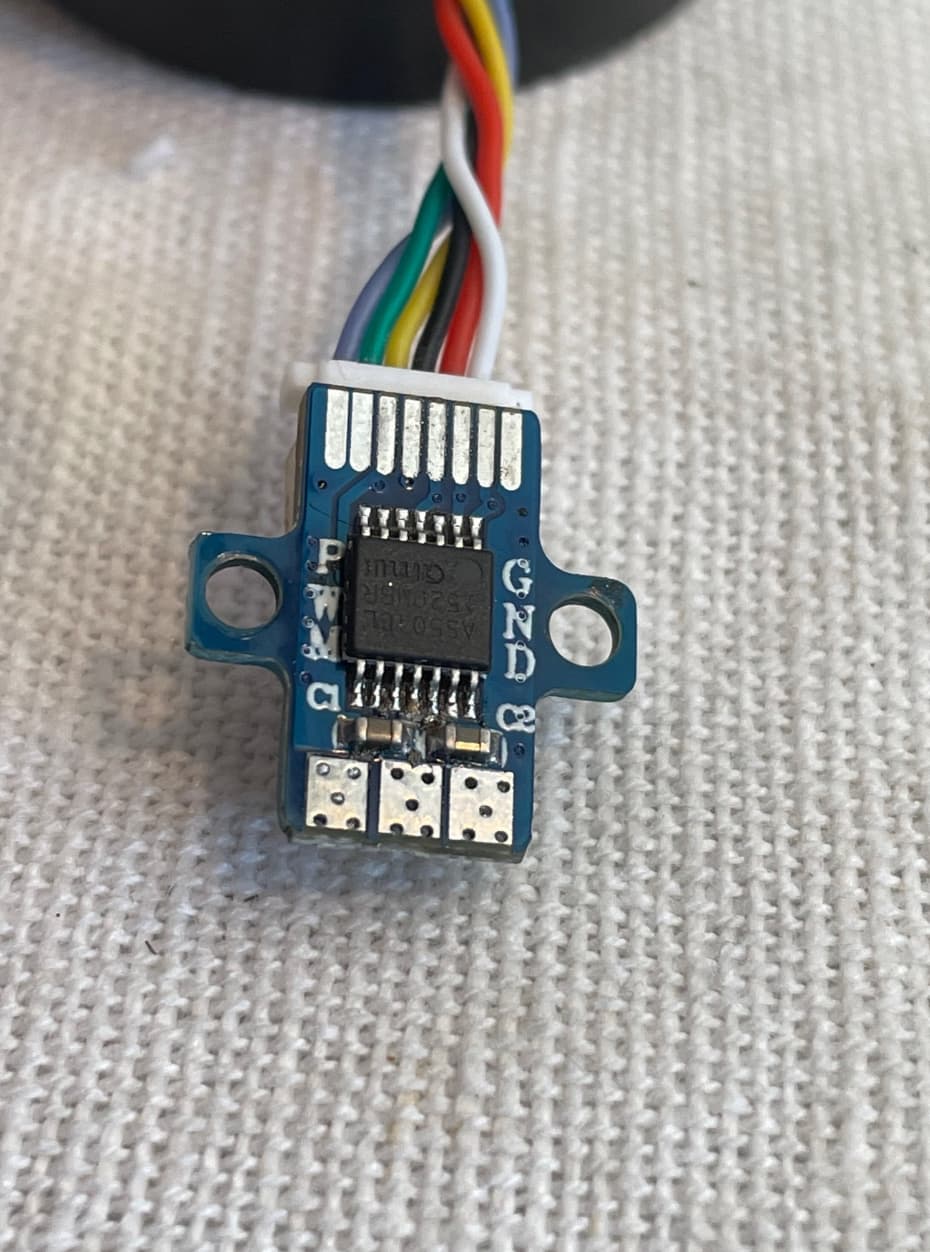
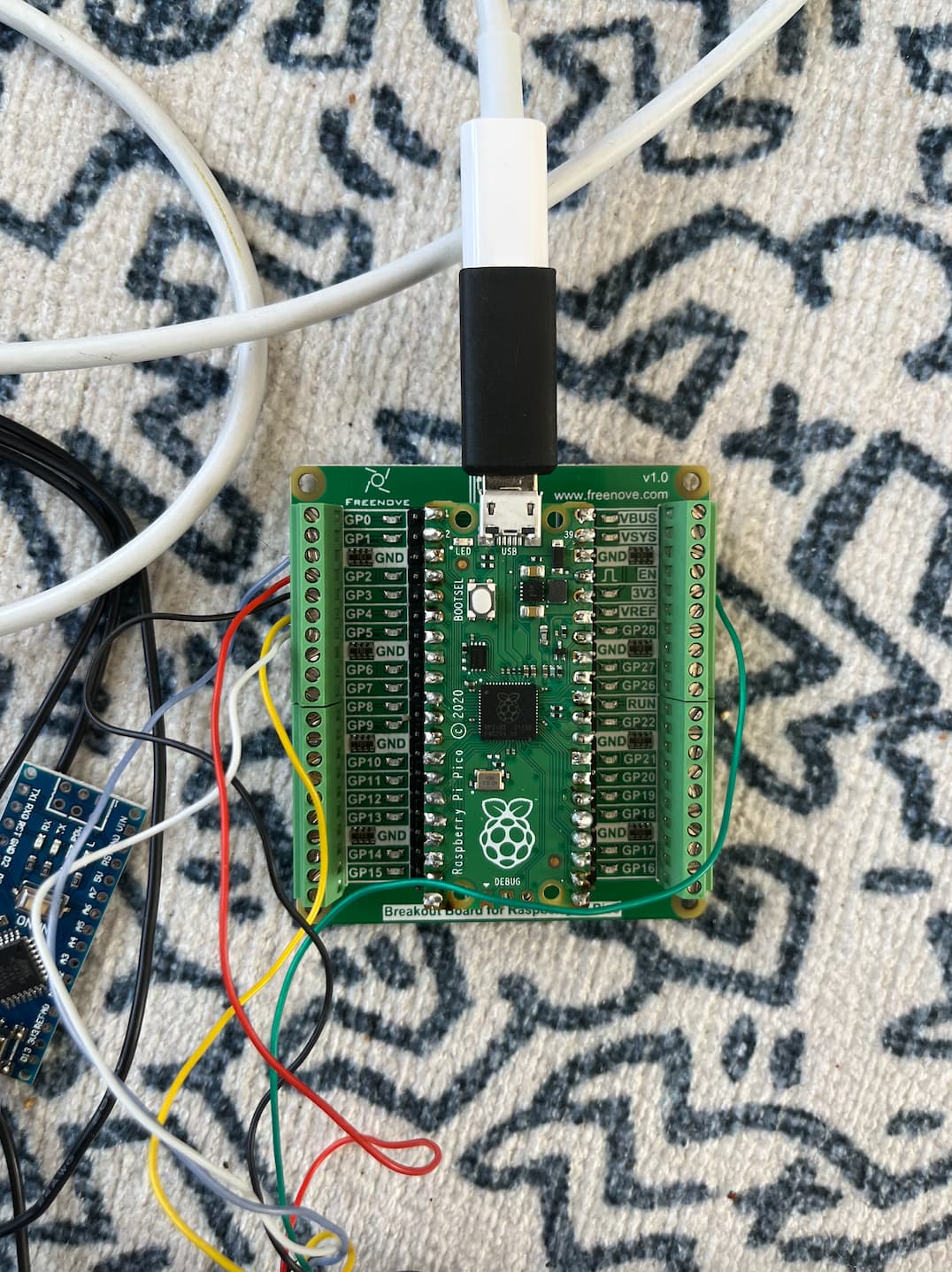
Hm I’ve tried connected the wire to a pi Pico as follows
I couldn’t get the encoder to run on the same code that worked on the Uno.
#include <SimpleFOC.h>
// MagneticSensorSPI(MagneticSensorSPIConfig_s config, int cs)
// config - SPI config
// cs - SPI chip select pin
// magnetic sensor instance - SPI
MagneticSensorSPI sensor = MagneticSensorSPI(AS5048_SPI, 10);
// alternative constructor (chipselsect, bit_resolution, angle_read_register, )
// MagneticSensorSPI sensor = MagneticSensorSPI(5, 14, 0x3FFF);
void setup() {
// monitoring port
Serial.begin(115200);
// initialise magnetic sensor hardware
sensor.init();
Serial.println("Sensor ready");
_delay(1000);
}
void loop() {
// iterative function updating the sensor internal variables
// it is usually called in motor.loopFOC()
// this function reads the sensor hardware and
// has to be called before getAngle nad getVelocity
sensor.update();
// display the angle and the angular velocity to the terminal
Serial.print(sensor.getAngle());
Serial.print("\t");
Serial.println(sensor.getVelocity());
}
I tried
MagneticSensorSPI sensor = MagneticSensorSPI(AS5048_SPI, 10);
MagneticSensorSPI sensor = MagneticSensorSPI(5, 14, 0x3FFF);
MagneticSensorSPI sensor = MagneticSensorSPI(7, 14, 0x3FFF);
but all i kept on getting was 0 values in the Arduino IDE serial port terminal. Any idea whether its a wiring/hardware issue or whether there’s something I should change in my code? many thanks for the help so far