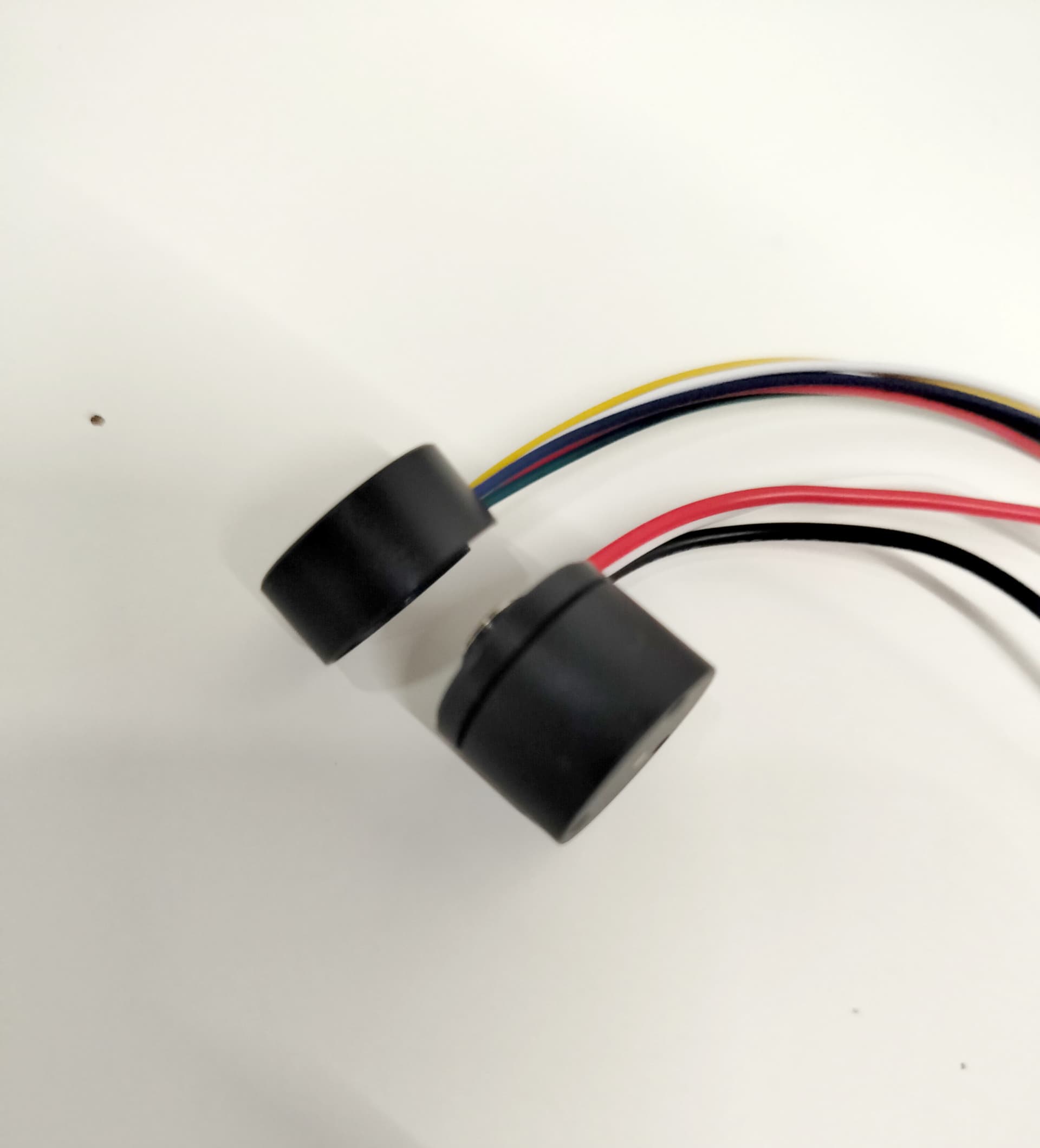
I ordered some miniature motors+AS5048A bundles at a Chinese manufacturer. Usually, their bundles come with the AS5048A wired in PWM. But this time, I specifically requested SPI wiring.
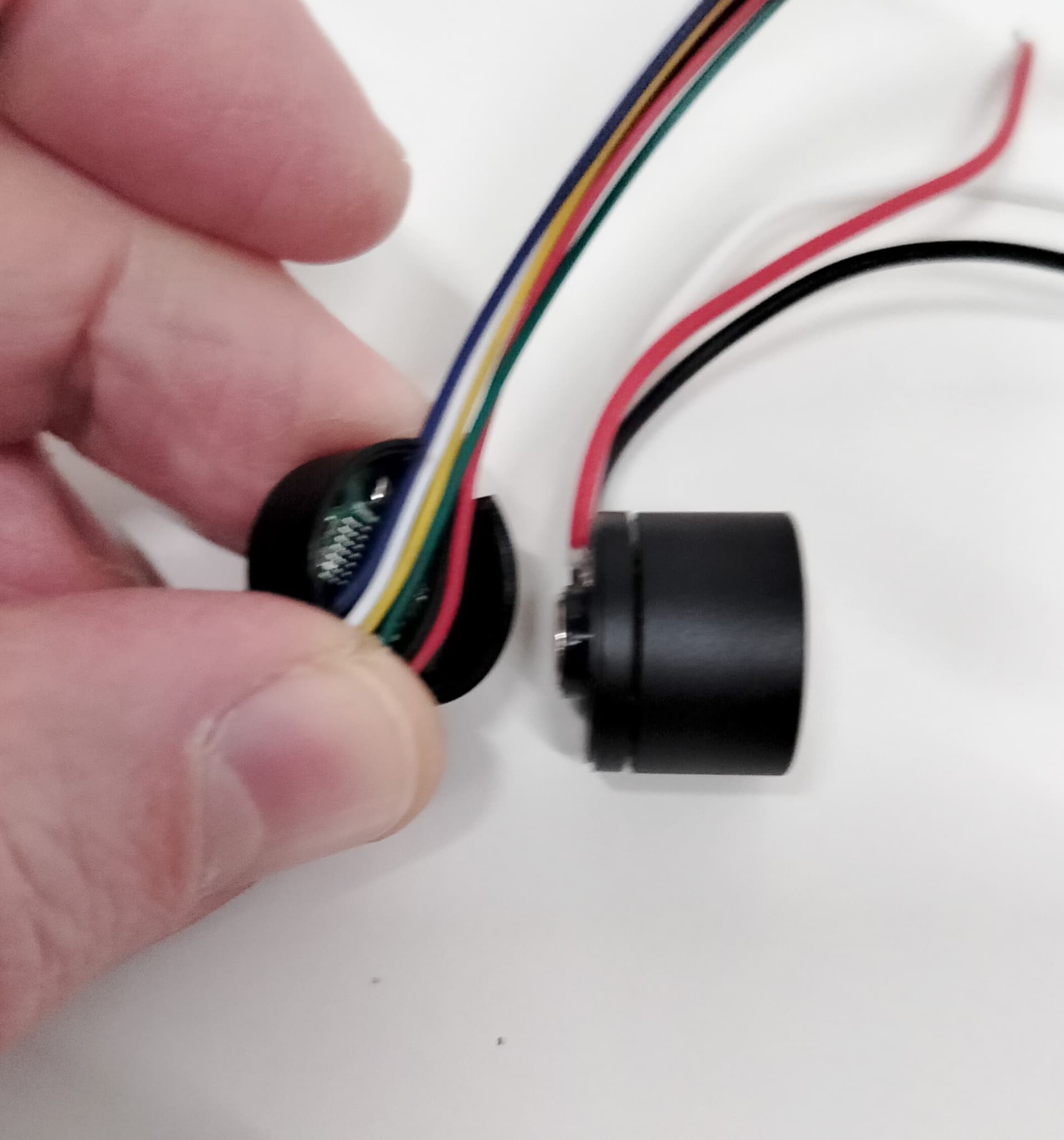
Not sure on that one. It’s a pretty small motor, so maybe it will work. I’d be more concerned about physical interference, as I assume the magnet will touch the cables in this configuration? That has the potential to make the motor’s motion less smooth, if the contact is not with constant friction.
Unfortunately this is not an error: the casing is asymmetrical (three screw holes), and so is the sensor PCB. Having the SPI wires going between the magnet and the sensor is the only easy way. What would really be required is a redesign of both the hood and the PCB.
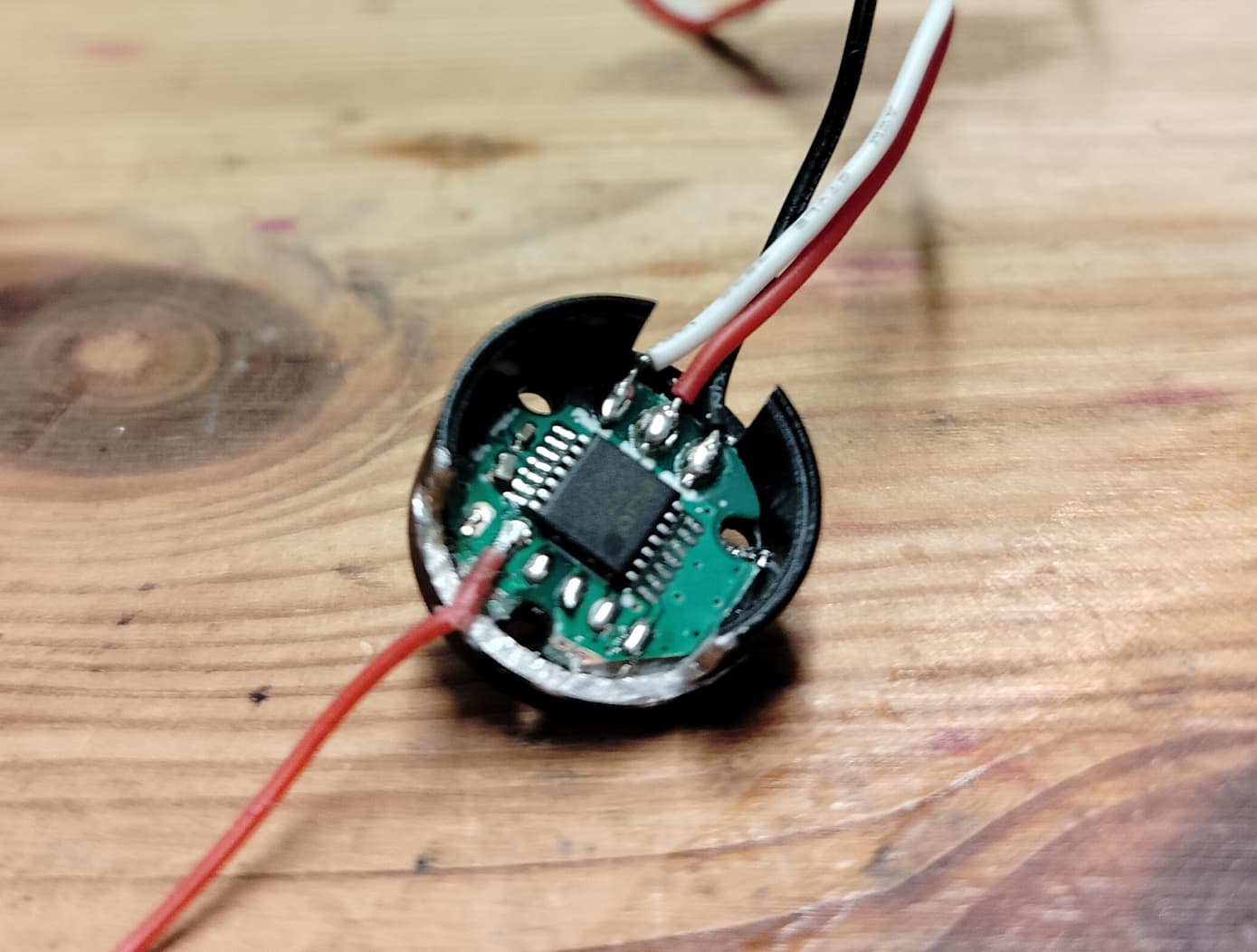
See this picture, where I sawn a new opening (bottom), which only solves half of the problem:
That’s the thing, right, it probably worked - only just - for the original purpose, so they called it good. But it’s not good for general use, not general purpose. That’s what happens when everyone is trying to mix up something on their own. We need standard building blocks. Getting a motor plus angle sensor pair should be easy and cheap.