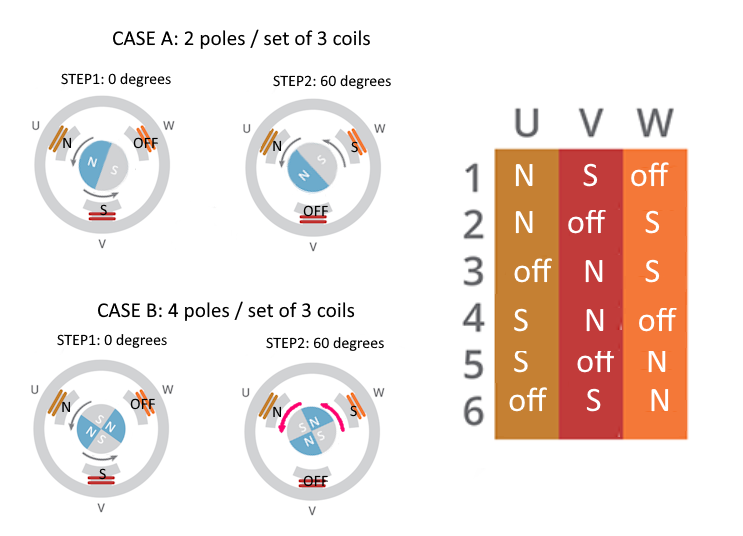
Hi All, The BLDC tutorials I used were like the first “CASE A” scenario, with 2 magnetic poles on the rotor per set of UVW stator coils ( 2/3 pole/coil ratio). In this case it’s easy to see that all 6 steps produce torque (I’ve shown illlustration of 2 steps)
HOWEVER
All the real-life motors I have and have seen are based on “CASE B” scenario, with 4 poles/ 3 coils. As in my illustratoin, torque doesn’t seem to be produced in step 2 or beyond. I must be looking at something wrong because these motors work though!
Maybe the second video in this post could help you understand: https://community.simplefoc.com/t/magnetic-field-viewers/4283?u=vipqualitypost
The field is “transferred” from pole to pole, causing the magnets to trail along, creating the motion. In your image, maybe it is too simplified. In order for torque to be made, you do have to the 6-step motion continuously, and with a specific relationship to the position and speed of the rotor, otherwise you will not generate torque.
Yes, the illustrated “step1” and “step2” positions shown were gotten into either by the back EMF from the “off” coil, or hall sensor, or other field measuring device. And yes of course the cycle repeats over and over.
I’m certainly no expert on motor construction, it’s a complex topic. But I’ll make an attempt:
The permanent magnets on the rotor determine the number of poles and pole-pairs.
The coils on the stator are arranged in a geometry to match the rotor poles. The number of windings is always three, but the number of stator teeth these windings are wound onto varies along with the number of pole pairs. Certain geometries will work, while others (like you have drawn) would not work and get “stuck”.
You’ve drawn the motors with 2 respective 4 poles, but always 3 slots. The 4 pole motor would not be constructed with 3 slots, but probably rather 6.
The slot to pole ratio with consideration for the number of phases is designated by the variable q. If q is less than 0.25 then the arc covered by a rotor pole is now less than half a stator tooth. This results in multiple north and south magnet poles interacting with each stator tooth and so the torque generated by the motor is reduced. Therefore, q values of less than 0.25 are generally not considered feasible and can be eliminated.
and:
Alternatively, if q is greater than 0.5 then it no longer makes sense to use a concentrated winding as a single rotor pole will span over multiple teeth. Instead, a distributed windings would be used.
There’s a good animation at the bottom of this page for the original LRK winding (every other stator tooth wound) http://www.aerodesign.de/peter/2001/LRK350/Warum_dreht_er_so_eng.html
Although I don’t think it’s quite right because the stator field should point half way between rotor magnets. As shown, the pulling force will be almost all radial (d-axis) rather than tangential (q-axis) which produces torque.
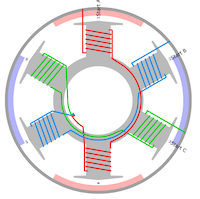
In fact, I think it’s exactly inverted from reality, because there should be two phases active at any given time. It should be like this:
I seriously dislike these diagrams, all of which are wrong in my experience. Someone needs to just carefully cut a gimbal motor open and use some of that magnetic field visualization paper, and graph 3 channels from the oscope in one video. It’s not 2 phases active at any time, the field strength and thus the de facto direction a compass would point if laid on top is continuously changing, also all the stator magnets are at least a bit energized at each moment. There aren’t a bunch that are totally unenergized. No wonder people get confused.
It’s the same thing with diagrams for the human body, they are just full of mistakes. I always have to dig up an actual x-ray to get the goods.
This depends on the type of commutation. In simple 6-step commutation, which is what most readily available ESCs are doing, there is indeed always one disconnected phase. And one disconnected phase would lead to several disconnected stator teeth / slots…