In the past few days, I was troubled by the TLE5012B encoder.
I used the ABI (or called IIF by Infineon) connecting the MCU ( I tested both Arduino Mega and ESP32), and read the angle of the motor by using the Simplefoc Library (I just measured the angle of the motor by TLE5012B, so the motor was not connected with the circuit).
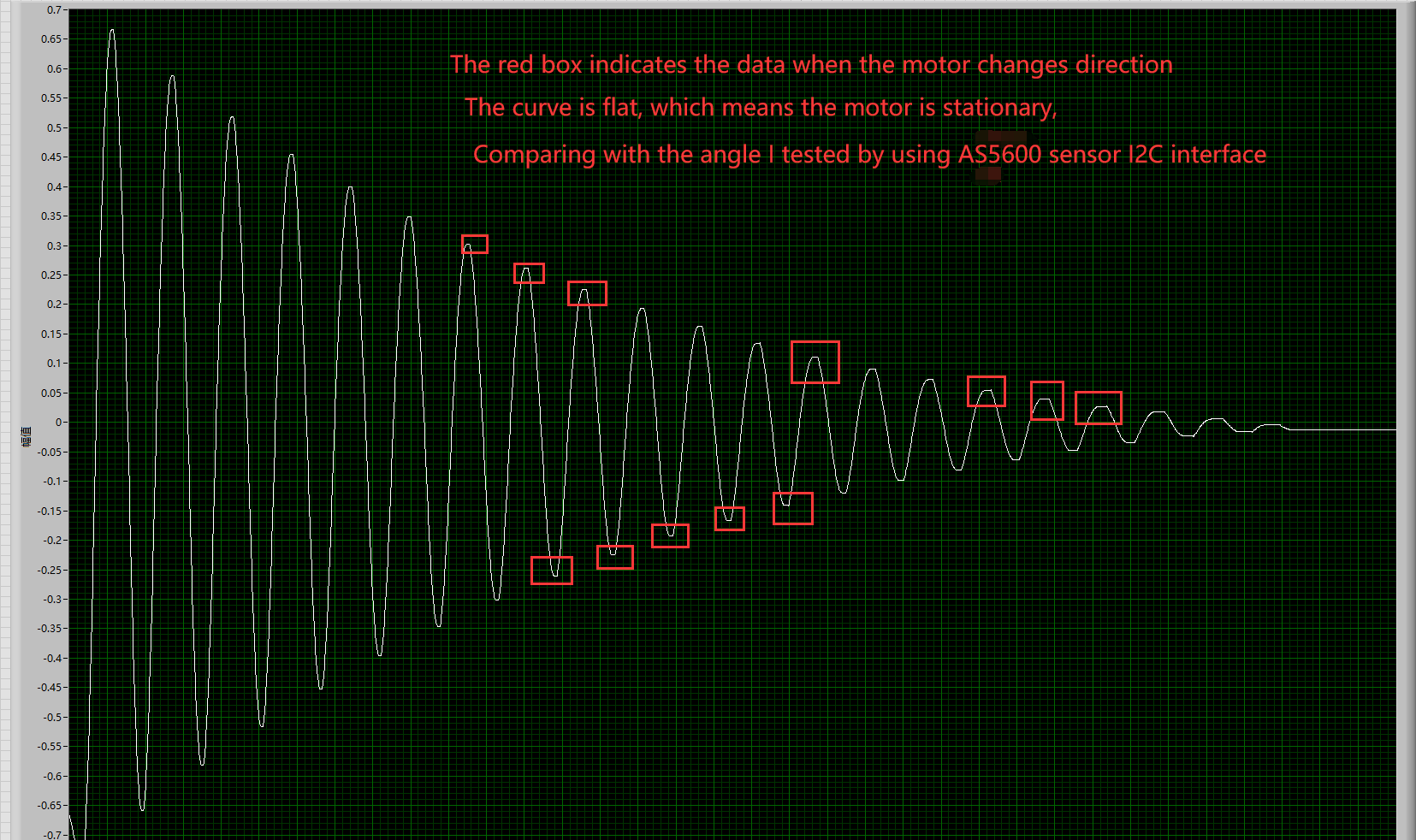
The angle I read always had some error when the motor changed direction.
( I continuously rotating the motor back and forth with my hand so the change of the motor angle was just like a damp spring-mass mode ).
As we can see in the first picture, the angle we get when the motor changed its direction was obviously wrong.
And I try to find the reason for this problem, so I used the oscilloscope to check the A & B single from the TLE5012B.
I find some “extra signals” which shouldn’t exist in the red box ( that noise are quietly similar to the A / B pulse signal but with a quite high frequency)
Besides, those “extra signals” only appear when the direction of motor changed.
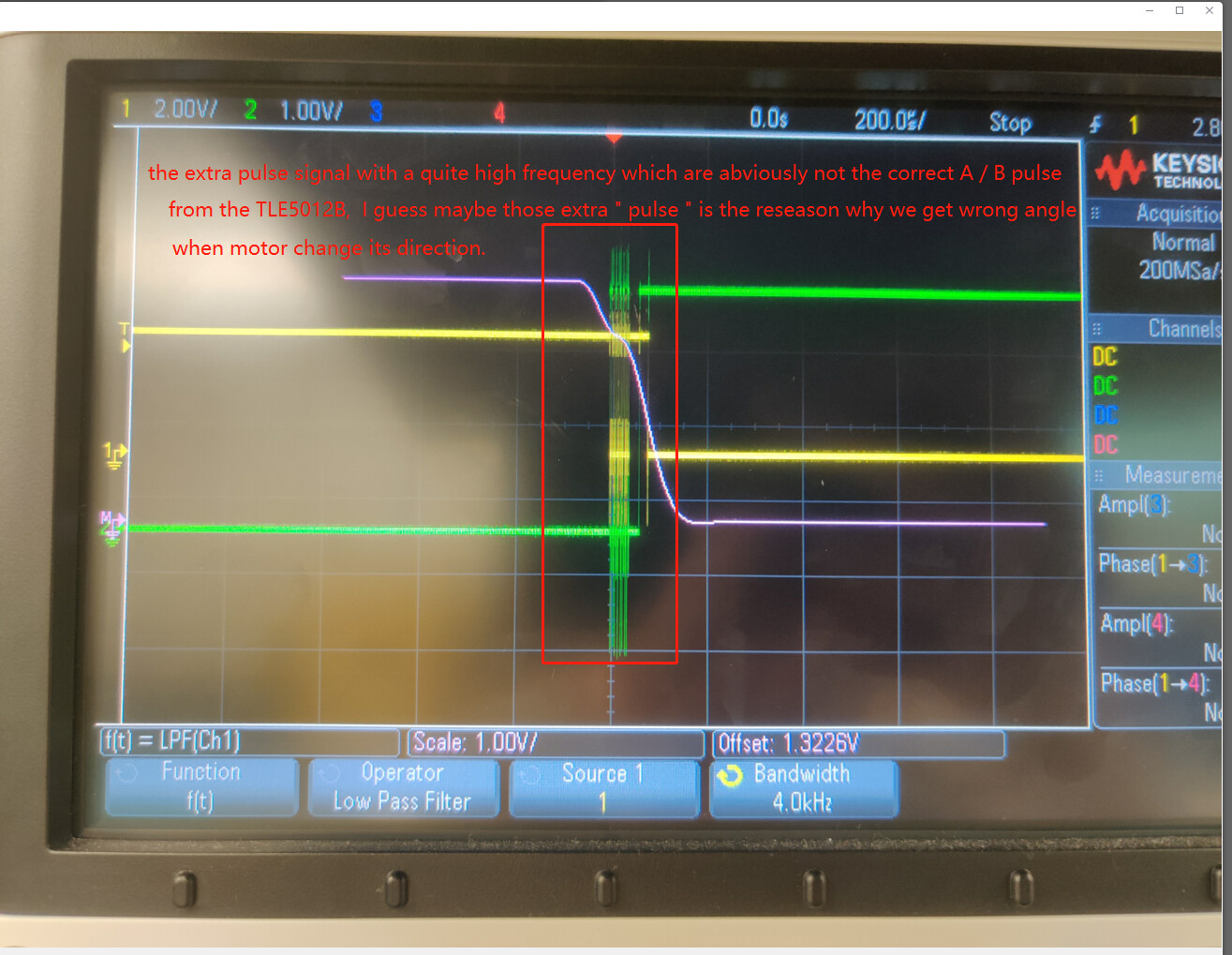

I “guess” (not sure) those “extra high-frequency pulse” is the reason why I get a wrong angle when the motor changes its direction.
And I have no idea why these interferences exist.
Has anyone encountered the same trouble as me? Or does anyone know the reason for this problem? ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()