So, for STM32, I have it working. Its just an initial implementation, you can currently find it here:
For the moment, you could copy the classes to your project if you want to try it out. In the next weeks we’ll probably manage a proper release, but for now it is on this branch in git.
Here’s what half-duplex SPI looks like:

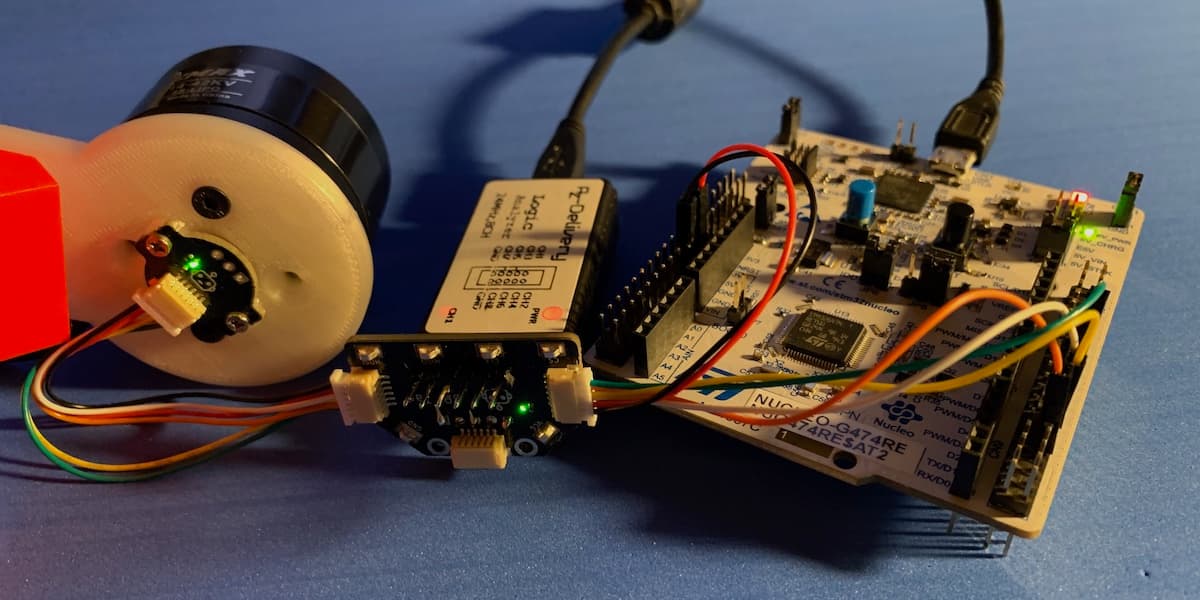
And this is my test setup - haven’t tried it with a motor yet, btw, just checked it outputs 0-2PI as you turn the motor by hand…
I’ll try to give it some more time in the next weeks, I’d like to get the velocity register working to compare that with the computed velocity we normally use…