Steadywin 5N.M GIM6010-8
Not bad for SimpleFOC, I guess
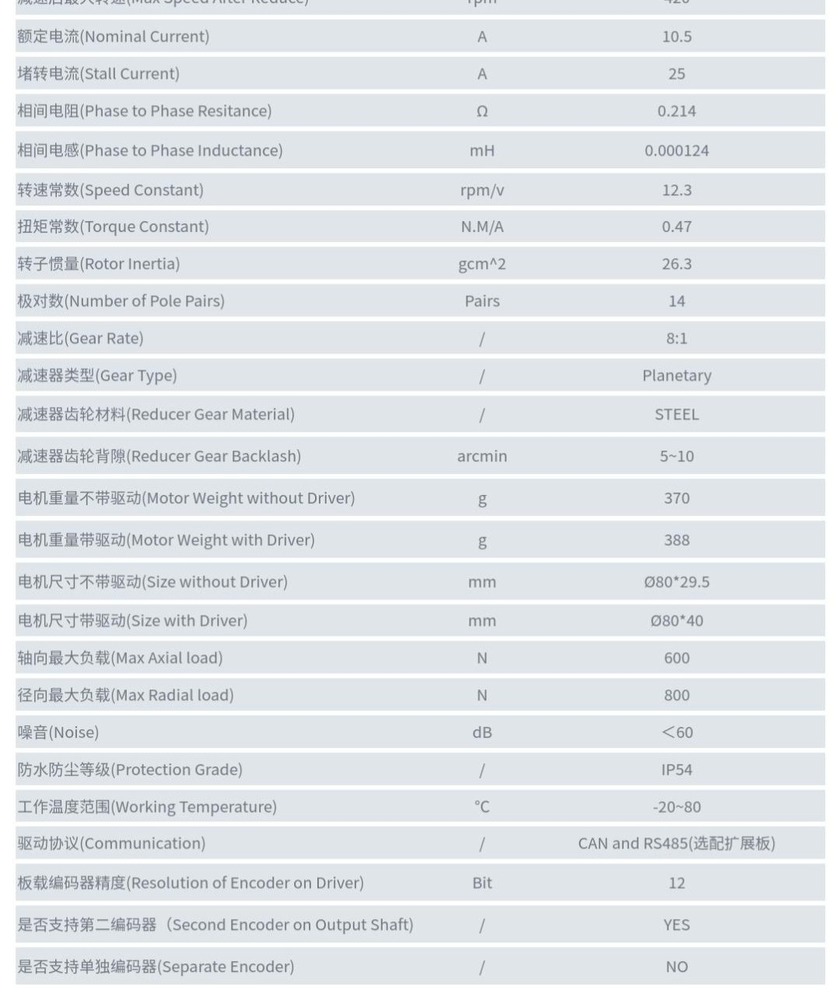
Nominal voltage = 24V
Nominal current = 10.5A
Nominal Power = 65W
How does that combine?
I guess, the motor overheats with continuous power > 65W?
Hello,
I’ll probably order one to test it with Chinese Odrive 3.6 controllers that are compatible with simpleFOC.
With an 8:1 reducer, it shouldn’t strain, and it’s all-aluminum construction, I think.
Since you can also buy it with a driver included it might be worth looking into the integrated package. I just emailed Steadywin asking for documentation on the driver.
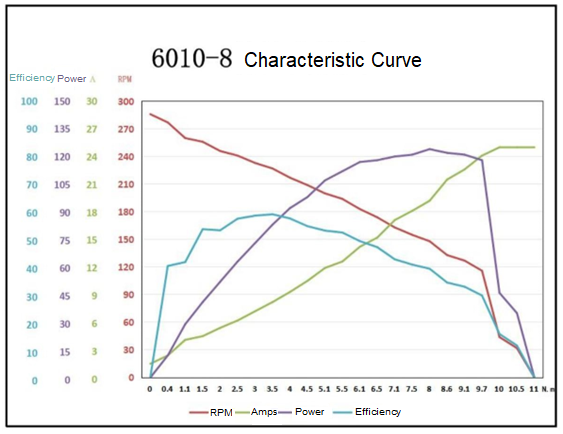
Steadywin provided me a copy of the manual in Chinese. Here’s a link to a version I ran through Google Translate. The Images with text didn’t get translated so I made modified the motor characteristics chart to translate it. https://drive.google.com/file/d/1DNvFJ1lQR4EmVzGjNB85w2pVHRir4s9p/view?usp=sharing
Based on the datasheet it looks like the optional driver uses Odrive 3.6 as well. $20 extra for the driver included seems like a good deal and it’s nice and compact integrated with the motor housing.
thank you ![]()
did you try asking him for the driver schematics?
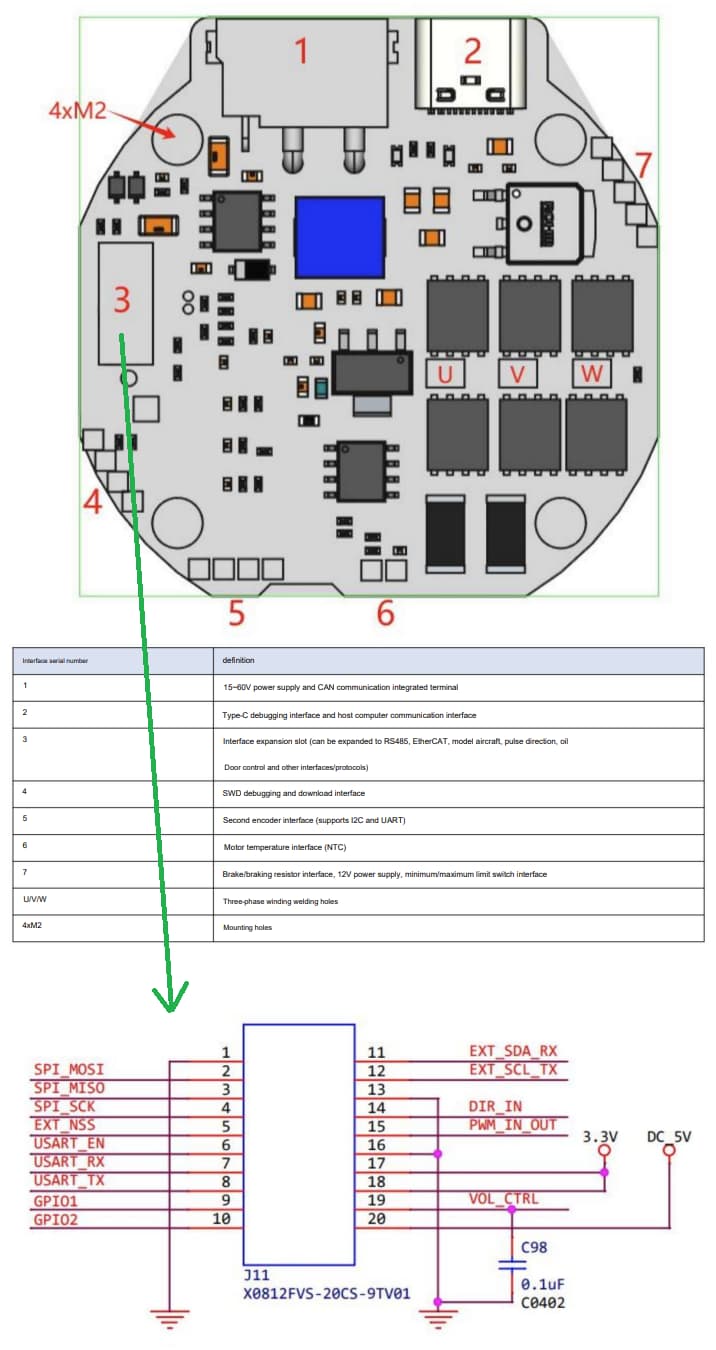
@AZSupra the docs are very good. The board layout/pins look good too. But I don’t think anyone will ever get simplefoc running on it. It uses a n32g455rel7 from nations technologies. Can’t find an Arduino core that supports that manufacturer. It is possible that this is a super close clone to an stmf4 or stm32g4 but the part number isn’t an obvious match.
So I’d treat this actuator as a closed firmware odrive clone. They provide the examples of how to use odrive client software to control the board (usb or CAN). The x0812fvs connector you pointed out has pwm in / direction but that is i think undocumented.
So in summary an odrive clone that could be very useful for many robotics projects but unlikely to have replaceable firmware.
The xioami cybergear in comparison has a gd32 chips which makes a simplefoc port possible. I prefer the extensibility of steadywin board so a bit of a shame about the n32 choice
I agree. They are both in the same price range anyway.
I don’t remember the motor specs of the cyberdog motor, but max. 60% efficiency seen in the SteadyWin-papers aren’t exactly a winner IMHO.
The chip is pin compatible with the GD32F303 but after comparing the datasheets there are a lot of differences in the memory mappings. I found several tutorials on this Chinese software developer site which makes me think this is do-able but really comes down to how much time and effort someone wants to sink into this. N32替换STM32记录_n32程序仿真正常单独运行不正常-CSDN博客
N32应用笔记1:keil新建工程,编译与烧录_keil烧录-CSDN博客
I’m sinking lots of time into the cybergear ![]() .
.
I’ve got closed loop working. Haven’t started looking at current sensing, instead I want to get a solid CAN client and server api. Here is a sneak peak of python client (which runs on my linux laptop)
@Candas1 helped me with some of the gd32 stuff and I’ve yet to try the current sense code that he gave me.
Nice work! I bought a steadywin to play with but I’d rather return it and get the cybergear if you get simplefoc running. No pressure ![]()
@AZSupra - I’ll probably post a video or two at the end of the month. I don’t think the cybergear will ever be a beginner option because of its lack of usart and having to solder on to the SWD pads to program it via stlink. There are quite a few repos/brances involved in the gd32 port (ArduinoCore-GD32, platform-gd32, Arduino-FOC, Arduino-FOC-drivers, SimpleCAN, SimpleCAN_TUI) so that might put people off too until (and if) upstream accepts my merges.
Perhaps best to keep this thread to SteadyWin. If you want to continue talking about cybergear then there is another cybergear thread for that
This is awesome! What python library do you use for this TUI-like GUI??
It’s using Textual, it’s a pretty good library. My work-in-progress SimpleCAN_TUI is using python-can which supports about 30 different CAN interfaces (I’m on linux and am using socketcan). MCU side, I’ve copied the Commander pattern making a CANCommander.cpp. There are some challenges - e.g does SimpleCAN support your mcu, are you happy using my CAN identifiers, etc. But at the very least it’s there to copy / try / change.
hi, I have trouble on this motor, I bought GIM6010-8. Firstly i can use confortable , but now dont move. I maybe mistake to use and chage setting from initial . So, anyone teach me reverce to inital setting or install firmware, please…
How are you able to resolve this? I’m in a similar situation.