Hi everyone
I’m using a stm32f4 discovery board with as5048a position sensor via SPI connection to a BLDC motor.
I use IGBT with corresponding driver to run motor.
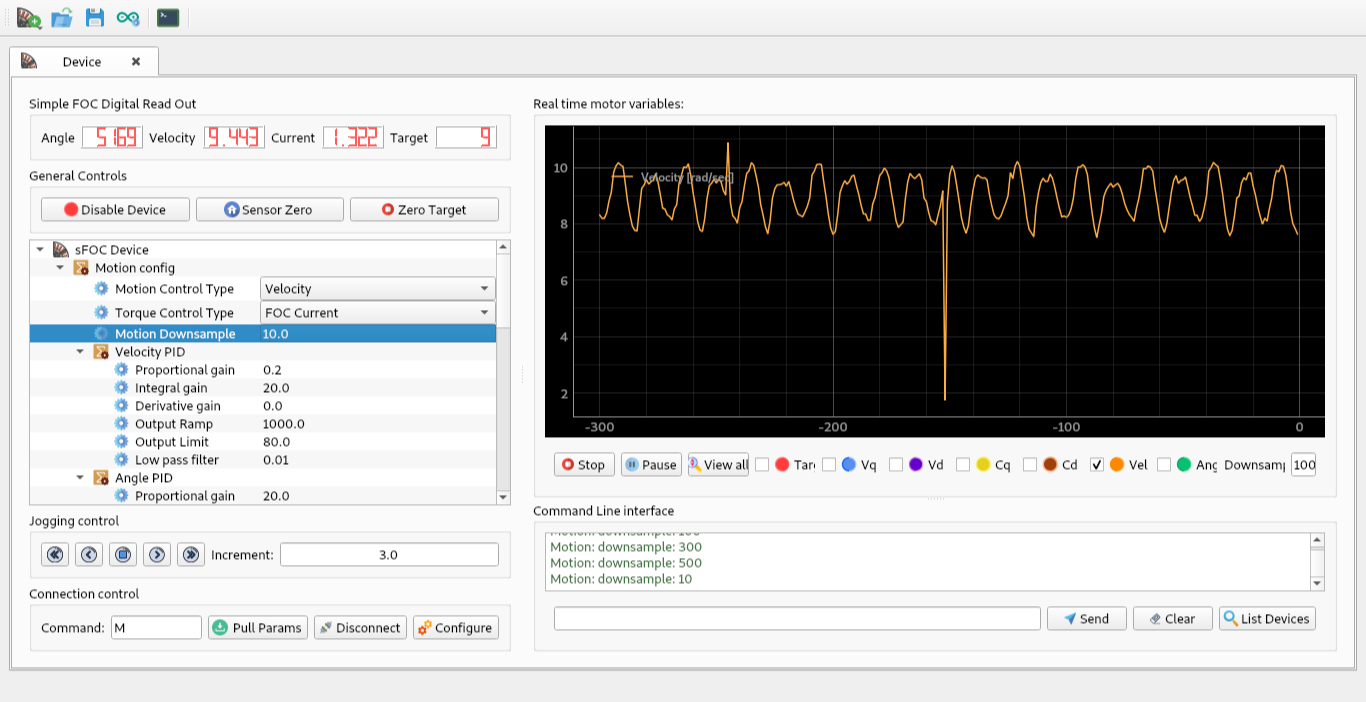
When I use simplefoc studio and monitor velocity, I see some significant spike on Vel.
My code :
#include <SimpleFOC.h>
HardwareSerial Serial1(PB11, PB10);
/// F407VGT6 TIM1
#define PHA_H PE9 // TIM1
#define PHA_L PA7 // TIM1
#define PHB_H PE11 // TIM1
#define PHB_L PB0 // TIM1
#define PHC_H PE13 // TIM1
#define PHC_L PB1 // TIM1
// /SPI 1 (AS5048A)
#define MOSI_ENC PB4
#define MISO_ENC PB5
#define CLK_ENC PB3
#define CS_ENC PE3
MagneticSensorSPI sensor = MagneticSensorSPI(AS5048_SPI, CS_ENC);
SPIClass SPI_1(MISO_ENC, MOSI_ENC, CLK_ENC); //(mosi, miso, sclk)
// BLDC motor & driver instance
BLDCMotor motor = BLDCMotor(5);
BLDCDriver6PWM driver = BLDCDriver6PWM(PHA_H, PHA_L, PHB_H, PHB_L, PHC_H, PHC_L);
InlineCurrentSense current_sense = InlineCurrentSense(40.0, PA0, PA1, PA2);
float target_velocity = 0;
Commander command = Commander(Serial1);
void doMotor(char* cmd) { command.motor(&motor, cmd); }
void setup() {
sensor.init(&SPI_1);
motor.linkSensor(&sensor);
driver.voltage_power_supply = 24;
driver.pwm_frequency = 32000;
driver.dead_zone = 0.05;
driver.init();
current_sense.linkDriver(&driver);
motor.linkDriver(&driver);
motor.voltage_sensor_align = 5;
motor.controller = MotionControlType::velocity;
motor.torque_controller = TorqueControlType::foc_current;
motor.foc_modulation = FOCModulationType::SpaceVectorPWM;
motor.PID_velocity.P = 0.2;
motor.PID_velocity.I = 20;
motor.PID_velocity.D = 0.0;
motor.PID_current_q.P = 0.15;
motor.PID_current_q.I= 0.4;
motor.PID_current_q.limit = 80.0;
motor.PID_current_d.P= 0.15;
motor.PID_current_d.I = 0.4;
motor.PID_current_d.limit = 80.0;
motor.LPF_current_q.Tf = 0.01f;
motor.LPF_current_d.Tf = 0.01f;
motor.phase_resistance = 0.25;
motor.current_limit = 80;
driver.voltage_limit = 20;
motor.voltage_limit = 20;
motor.PID_velocity.output_ramp = 1000;
motor.LPF_velocity.Tf = 0.01f;
motor.LPF_angle.Tf = 0.01f;
Serial1.begin(115200);
motor.useMonitoring(Serial1);
motor.monitor_downsample = 0;
motor.init();
current_sense.init();
motor.linkCurrentSense(¤t_sense);
motor.initFOC();
command.add(‘M’, doMotor, “Motor”);
Serial1.println(F(“Motor ready.”));
Serial1.println(F(“Set the target velocity using serial terminal:”));
_delay(1000);
}
void loop() {
motor.loopFOC();
motor.move();
motor.monitor();
command.run();
}
The motor has a vibrant sound and idk how to remove it.
It has to work without sound like this.