@dekutree64 I think your interpolation is totally fine, and the value of the phase_correction is also fine.
I first thought the zero angle was a problem but min/max speeds are pretty close.
The problem is not the rotor position, your interpolation estimates it well.
The problem is that as the speed increases, the target vector is not at 90 degrees anymore.
I did a quick test adding the inductance parameter for lag compensation and it was promising.
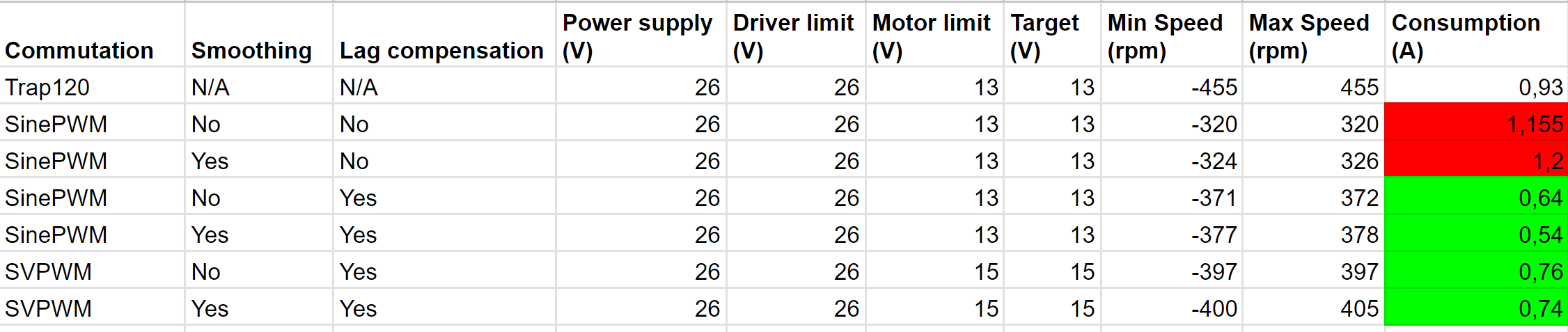
I will update the table I shared earlier with the different commutations/speed/consumption.
It’s true that the current calibration is not optimal for hall sensors, but I am happy to help with this if you are interested. Having the hall state start/middle/end will also help having a smoother velocity thus a better velocity control.
[EDIT]
SinePWM and SVPWM are much quieter with your extrapolation, and it only slighty increases the speed so phase_correction is ok, no field weakening.
With the lag compensation, consumption is divided by 2 with a higher speed.
SVPWM is faster than SinePWM as you can use a higher voltage limit and target, but still slower than trap120.
I haven’t collected the consumption in both directions, but although the speed is close, there are gaps in consumption.
I probably need to tweak the zero_electrical_angle as I kept the value from the calibration. The inductance parameter could also not be optimal.