Hi @runger,
I using a nema17 2 phase motor, 4 wires. I connected the Out 1,2 to A1,A2 and Out 3,4 to B1,B2 respectively.
Serial monitor output:
PP check result is kind of random. It fluctuates. It works sometimes for the same input.
I tried lowering the voltage limit to 1 volt and the motor does not move.
Closed loop, open loop velocity and torque control examples I tried.
#include <SimpleFOC.h>
// magnetic sensor instance - SPI
//MagneticSensorSPI sensor = MagneticSensorSPI(AS5147_SPI, 10);
// magnetic sensor instance - I2C
MagneticSensorI2C sensor = MagneticSensorI2C(AS5600_I2C);
// magnetic sensor instance - analog output
// MagneticSensorAnalog sensor = MagneticSensorAnalog(A1, 14, 1020);
// BLDC motor & driver instance
//BLDCMotor motor = BLDCMotor(11);
//BLDCDriver3PWM driver = BLDCDriver3PWM(9, 5, 6, 8);
// Stepper motor & driver instance
StepperMotor motor = StepperMotor(50);
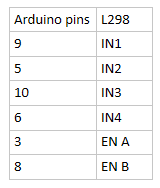
StepperDriver4PWM driver = StepperDriver4PWM(9, 5, 10, 6, 3, 8);
// voltage set point variable
float target_voltage = 2;
// instantiate the commander
Commander command = Commander(Serial);
void doTarget(char* cmd) { command.scalar(&target_voltage, cmd); }
void setup() {
digitalWrite(11,OUTPUT);
// digitalWrite(3,OUTPUT);
// digitalWrite(8,OUTPUT);
digitalWrite(11,HIGH);
// digitalWrite(3,HIGH);
// digitalWrite(8,HIGH);
// initialise magnetic sensor hardware
sensor.init();
Wire.setClock(100000);
// link the motor to the sensor
motor.linkSensor(&sensor);
// power supply voltage
driver.voltage_power_supply = 12;
driver.init();
motor.linkDriver(&driver);
// aligning voltage
motor.voltage_sensor_align = 5;
// choose FOC modulation (optional)
motor.foc_modulation = FOCModulationType::SpaceVectorPWM;
// set motion control loop to be used
motor.controller = MotionControlType::torque;
// use monitoring with serial
Serial.begin(115200);
// comment out if not needed
motor.useMonitoring(Serial);
// initialize motor
motor.init();
// align sensor and start FOC
motor.initFOC();
// add target command T
command.add(‘T’, doTarget, “target voltage”);
Serial.println(F(“Motor ready.”));
Serial.println(F(“Set the target voltage using serial terminal:”));
_delay(1000);
}
void loop() {
// main FOC algorithm function
// the faster you run this function the better
// Arduino UNO loop ~1kHz
// Bluepill loop ~10kHz
motor.loopFOC();
// Motion control function
// velocity, position or voltage (defined in motor.controller)
// this function can be run at much lower frequency than loopFOC() function
// You can also use motor.move() and set the motor.target in the code
motor.move(target_voltage);
// user communication
command.run();
}