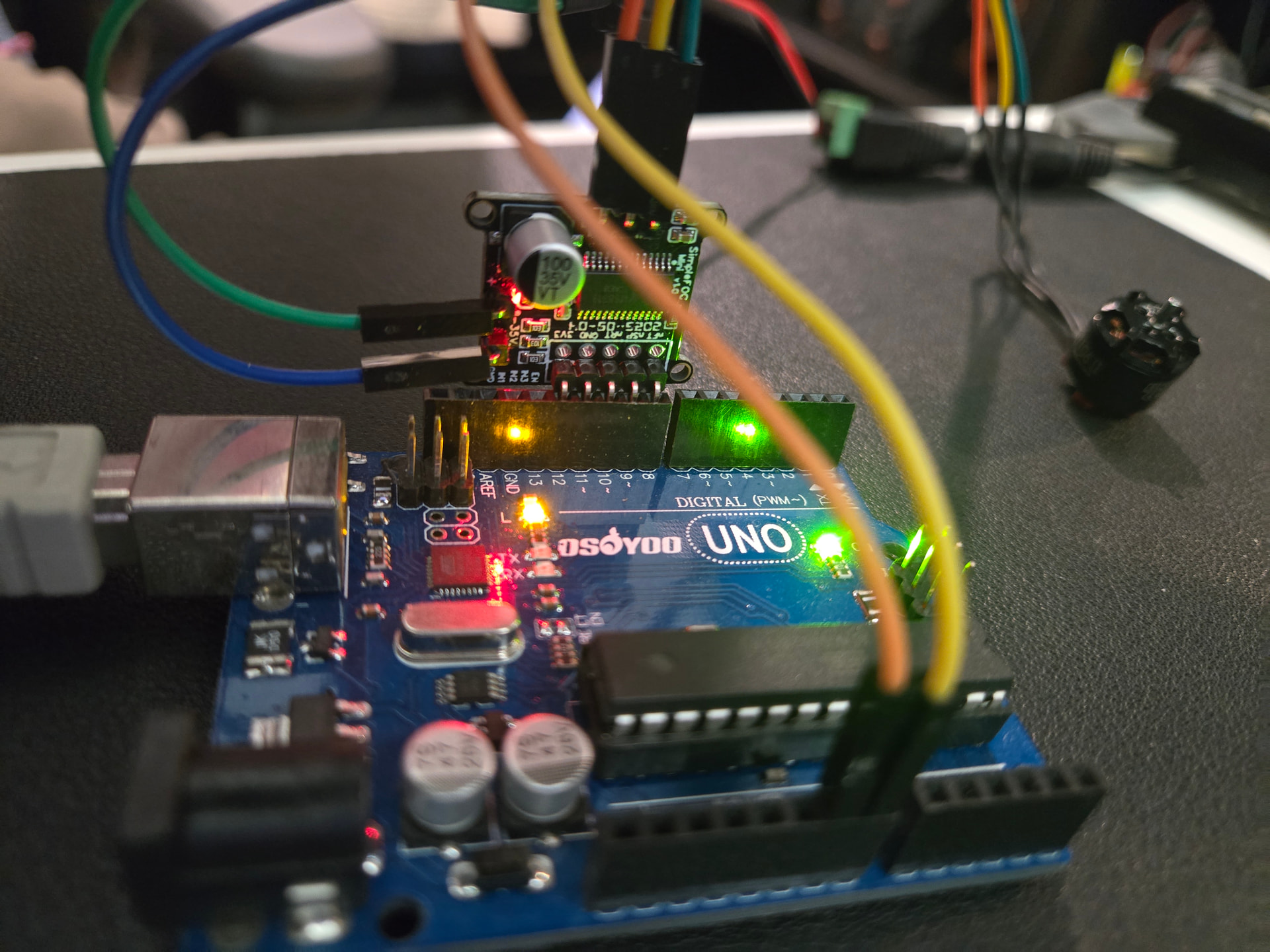
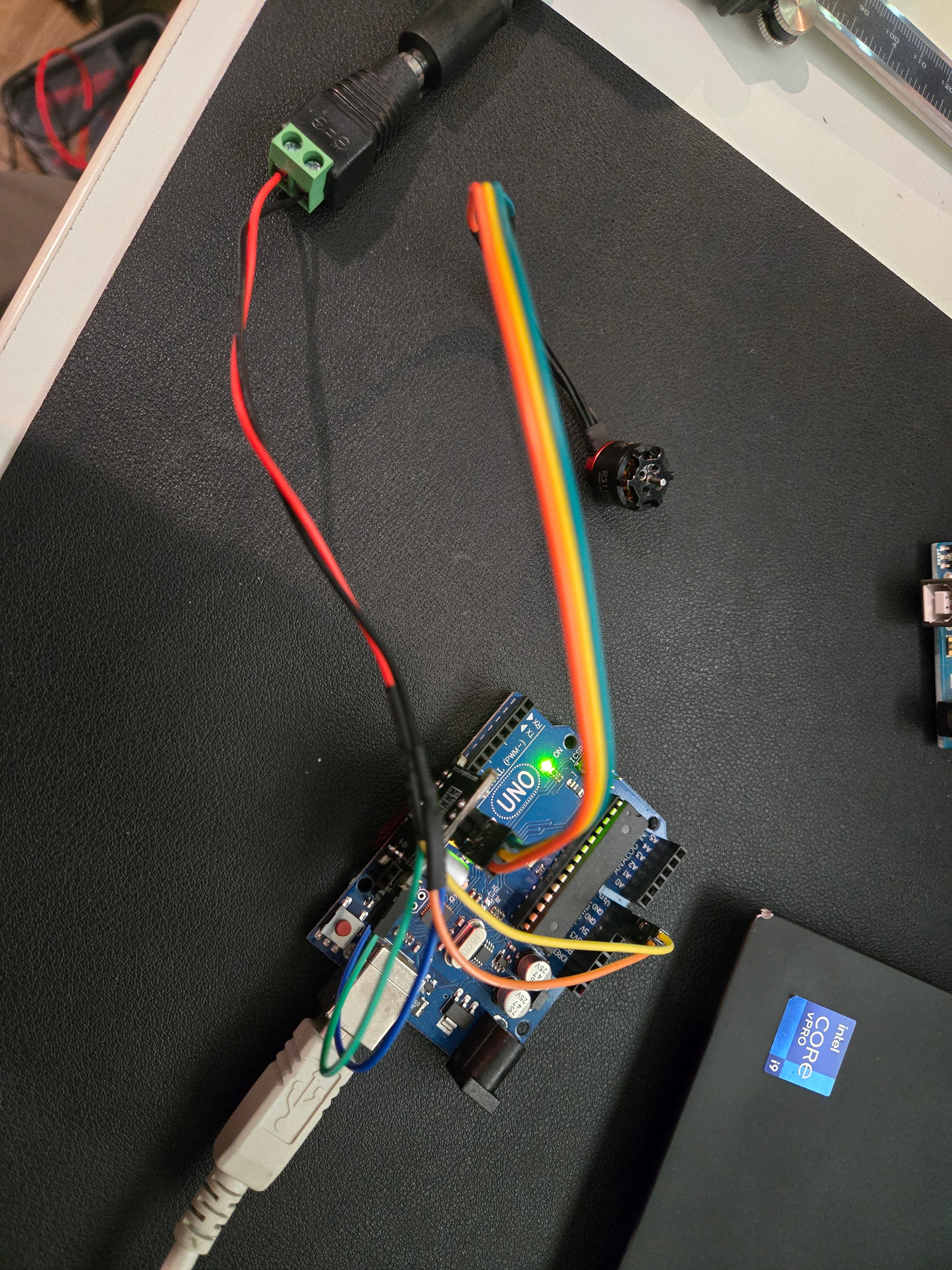
Motor shows no signs of life. Driver doesn’t heat up.
I’ve tried running the motor in open loop mode just to see if the controller is working (script attached below). The motor is a 6000kv 6 pole motor, about 1.5 ohms resistance. Power supply is 12V 12A. I’ve tripled checked the wiring and measured all the enable/fault pins and all seems nominal.
#include <SimpleFOC.h>
// — PIN DEFINITIONS —
const int IN1_PIN = 11;
const int IN2_PIN = 10;
const int IN3_PIN = 9;
const int EN_PIN = 8;
// 1. Instantiate the motor with 6 POLE PAIRS (12 magnets / 2)
BLDCMotor motor = BLDCMotor(6);
// 2. Instantiate the driver
BLDCDriver3PWM driver = BLDCDriver3PWM(IN1_PIN, IN2_PIN, IN3_PIN, EN_PIN);
// Target velocity variable (in radians per second)
float target_velocity = 5.0;
// Instantiate the serial commander
Commander command = Commander(Serial);
void doTarget(char* cmd) { command.scalar(&target_velocity, cmd); }
void setup() {
// — PIN 12 LOGIC GROUND —
pinMode(12, OUTPUT);
digitalWrite(12, LOW);
// Setup serial communication
Serial.begin(115200);
// Power supply voltage set to 9V
driver.voltage_power_supply = 9.0;
// Initialize driver
driver.init();
// Link the driver to the motor
motor.linkDriver(&driver);
// — CURRENT LIMITING WITH KNOWN RESISTANCE —
// Now that we know the resistance, SimpleFOC can safely calculate the required voltage.
motor.phase_resistance = 1.5; // [Ohms]
// Set the current limit to 1.0 Amp
motor.current_limit = 1.0; // [Amps]
// Set motion control loop to be open loop velocity
motor.controller = MotionControlType::velocity_openloop;
// Initialize motor
motor.init();
// Add the target command to the commander
command.add(‘T’, doTarget, “target velocity”);
Serial.println(“Motor ready! Send ‘T10’ for 10 rad/s, ‘T0’ to stop.”);
_delay(1000);
}
void loop() {
// Move the motor at the target velocity
motor.move(target_velocity);
// Listen for serial commands
command.run();
}