Hi everyone, I’d like someone to have a look over my schematic to make sure I haven’t made any stupid mistakes, any feedback would be massively appreciated.
This will be mounted on a proof of concept test rig simulating how an exoskeleton with a such system (1DOF e.g. elbow joint) would behave. Motor this will be used with: The Myactuator RMD X6 BLDC 36:1 24V 2.6 A (nominal) 18 Nm (nominal). The test rig will simulate a patient performing isometric type of exercise, pushing against the motor at a locked position until a defined/selected force is achieved; and isokinetic type of exercise, patient moving along the range of motion with a defined/selected resistance or ‘stiffness’. ESP32 will simplify UI implementation and integration with one core hosting the UI AP.
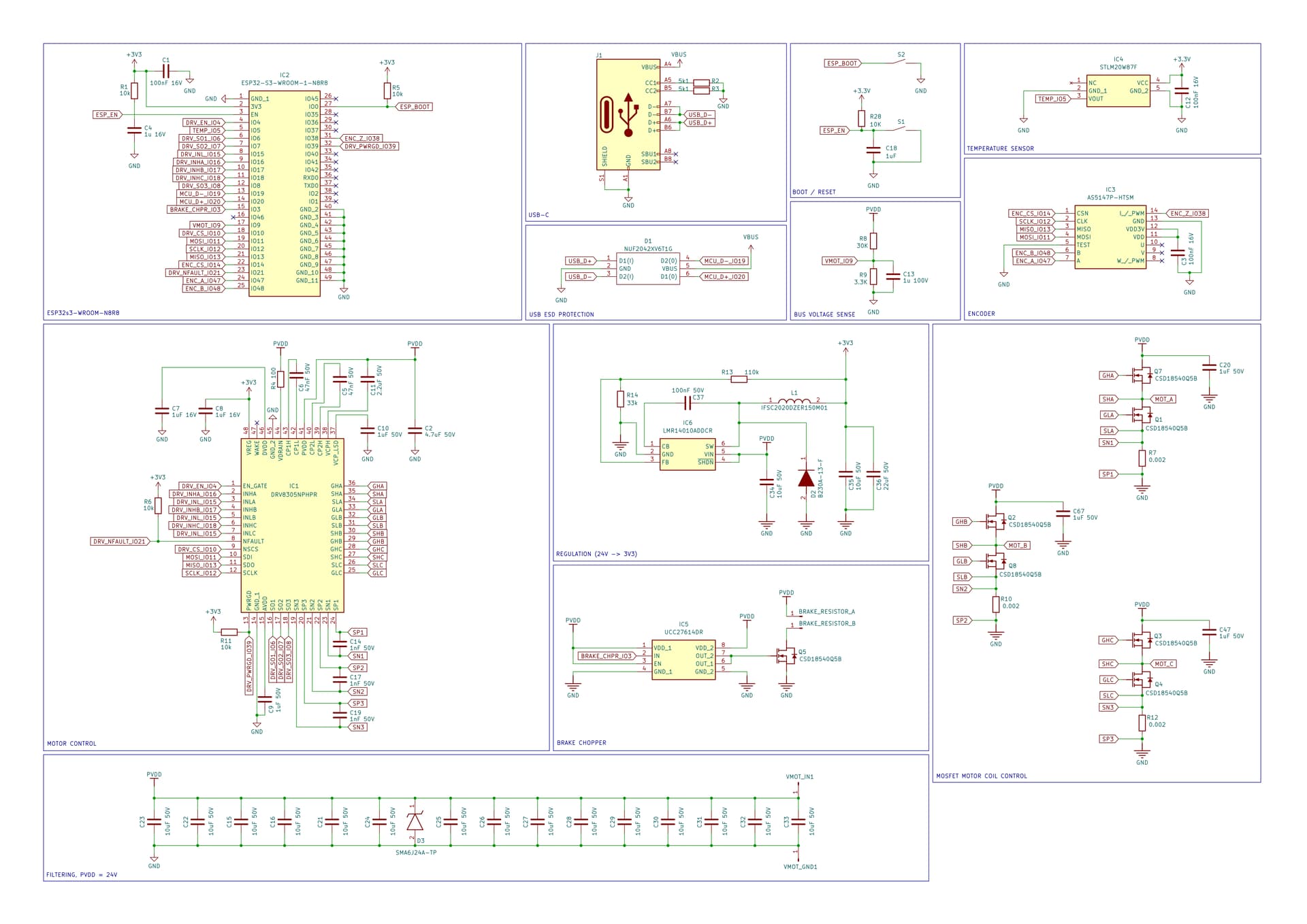
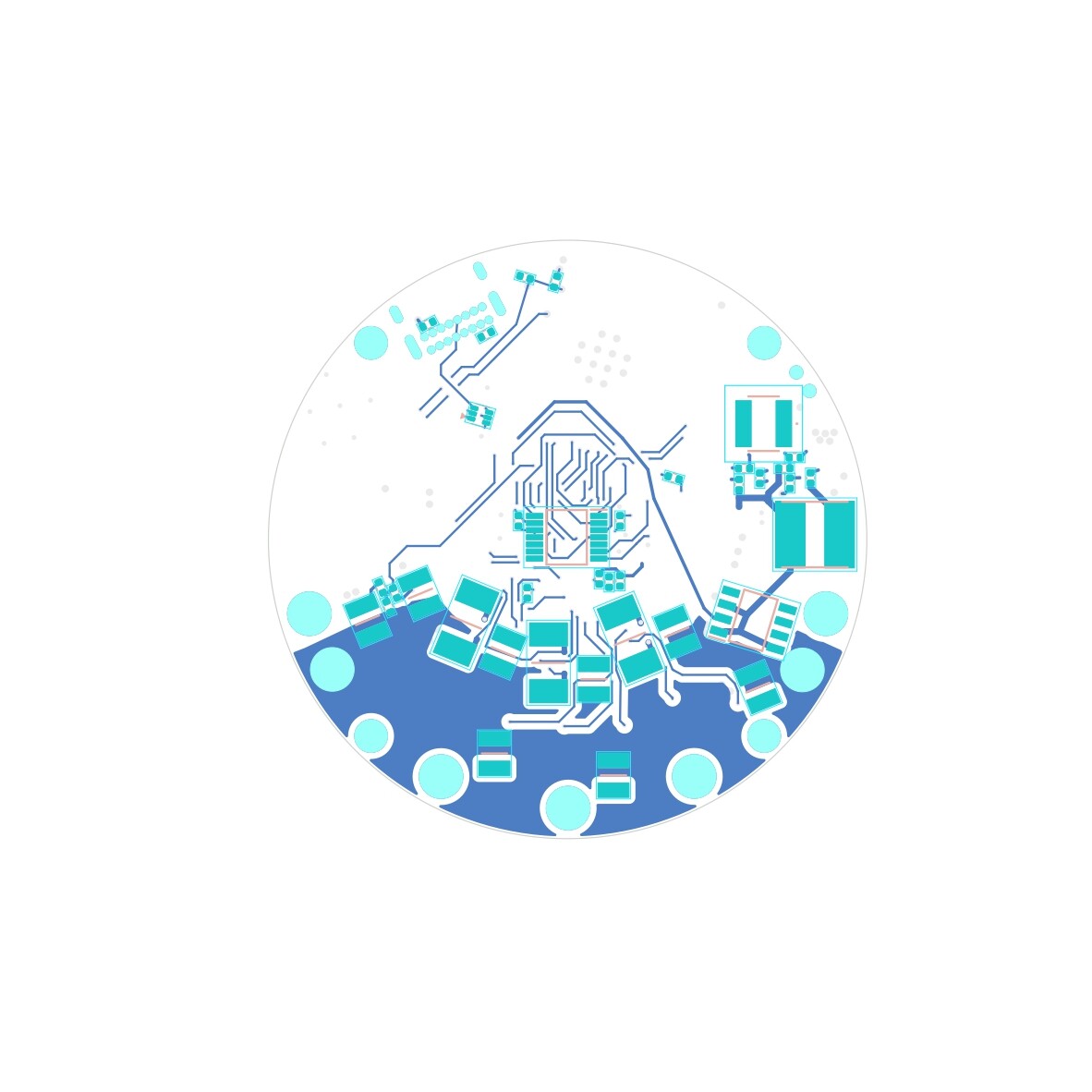
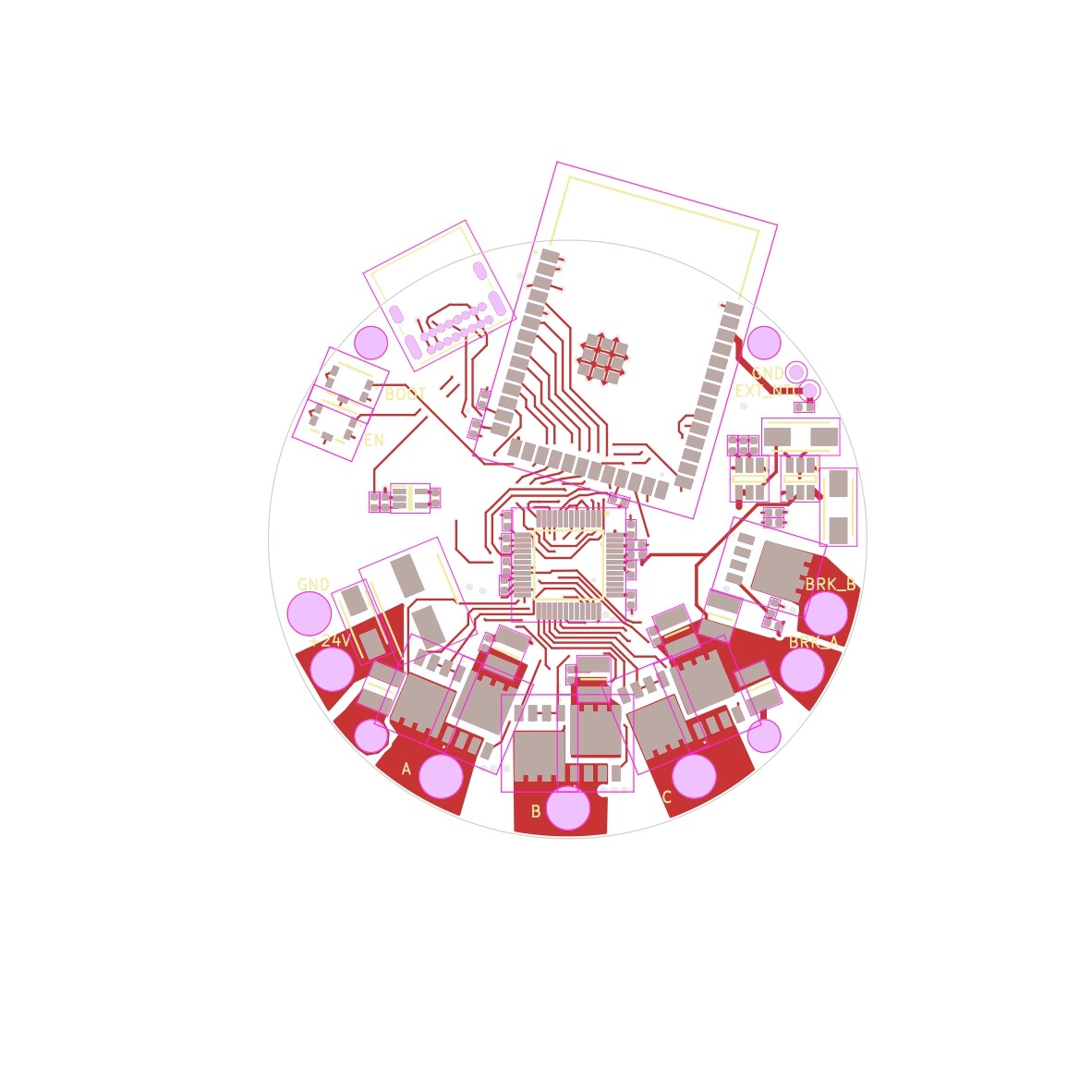
Schematics:
Thanks a lot for your time!
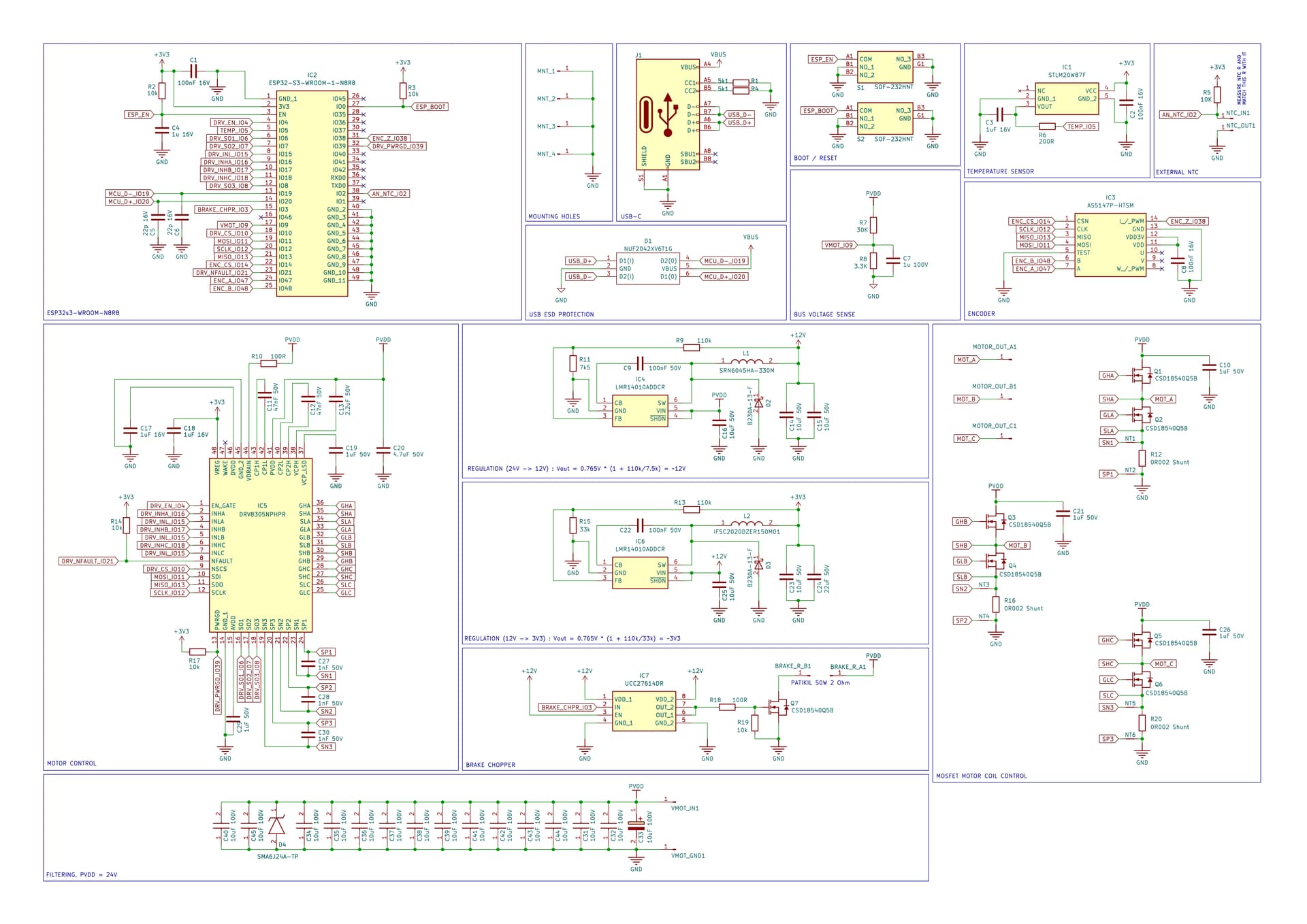


I will use it at 24V, 2A~8A. I'll try to upload the newest images.
– FilipH