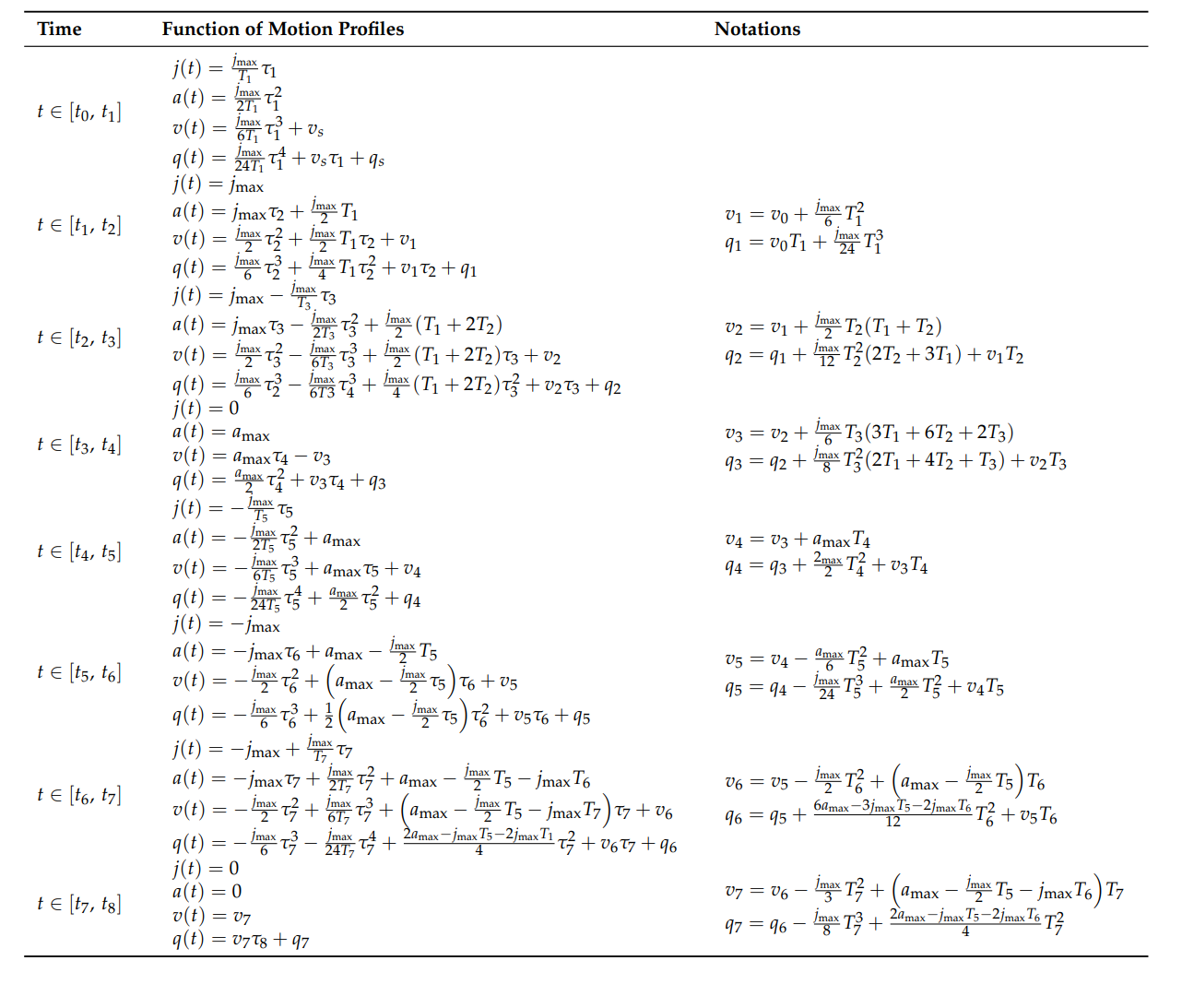
I suppose, if we have the jerk (linear) and the end position, within each time-segment (T1 - T15), we can translate that to position (displacement) ?
The overall concept does look fine, I just think some of the math is wrong. In the paper there is a typo in the formulas.
See the calculation for q4. in the formula there is 2max variable, but it has no reference.