Ok i think i cracked it!
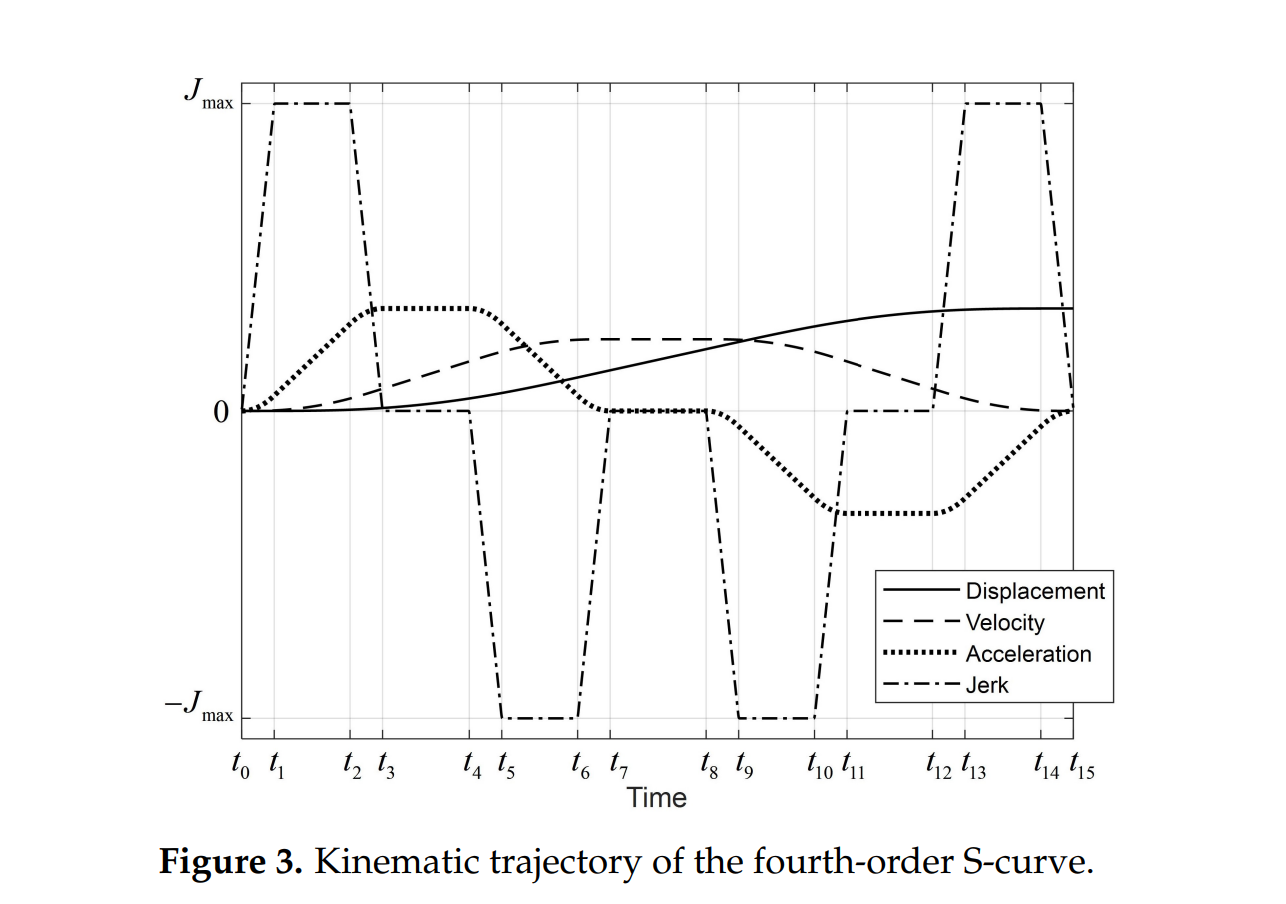
Here are the transition times between the 15 segments.
// Calculate transition times for acceleration phase, using Ts (varying jerk), Tj (constant jerk), and
//Tv(constant velocity - aka cruice)
t1 = Ts;
t2 = t1 + Tj;
t3 = t2 + Ts;
t4 = t3 + Tj;
t5 = t4 + Ts;
t6 = t5 + Tj;
t7 = t6 + Ts;
//Constant velocity
t8 = t7 + Tv;
// Calculate transition times for deceleration phase
t9 = t8 + Ts;
t10 = t9 + Tj;
t11 = t10 + Ts;
t12 = t11 + Tj;
t13 = t12 + Ts;
t14 = t13 + Tj;
t15 = t14 + Ts;