Hi.
My setup: 1.8 deg stepper motor 42STH60-1206A (nema 17), l298n, encoder Autonics E40H12-5000-6-L-5, 5000 ppr.
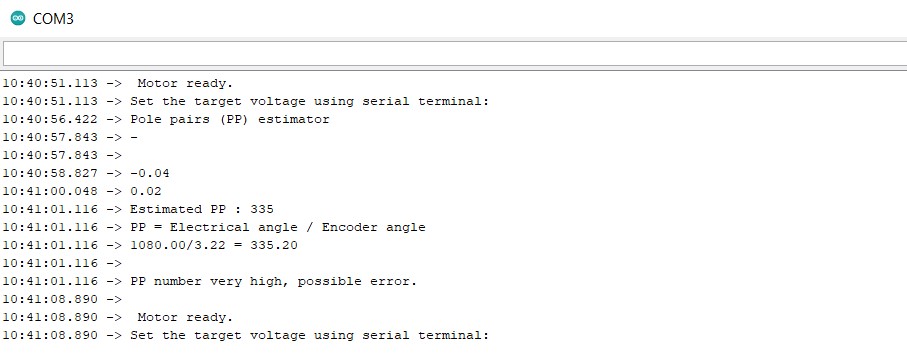
I’ve tried running example “find_pole_pairs_number”. The results are shown in the figure. After finding the poles, the motor starts to vibrate slightly and make noise. I tried to start the engine in angle_openloop mode, everything works fine. I also tested the encoder with the “encoder example”. Works fine too. What could be the problem?
Code
#include <SimpleFOC.h>
// Stepper motor instance
// its important to put pole pairs number as 1!!!
StepperMotor motor = StepperMotor(1);
StepperDriver4PWM driver = StepperDriver4PWM(PE9, PE11, PE13, PE14, PD0, PD1);
// Encoder(int encA, int encB , int cpr, int index)
Encoder encoder = Encoder(PA0, PA1, 5000);
// interrupt routine intialisation
void doA(){encoder.handleA();}
void doB(){encoder.handleB();}
void setup() {
encoder.quadrature = Quadrature::OFF;
// initialise encoder hardware
encoder.init();
// hardware interrupt enable
encoder.enableInterrupts(doA, doB);
// link the motor to the sensor
motor.linkSensor(&encoder);
// power supply voltage
// default 12V
driver.voltage_power_supply = 12;
driver.init();
motor.linkDriver(&driver);
// initialize motor
motor.init();
// monitoring port
Serial.begin(115200);
// pole pairs calculation routine
Serial.println("Pole pairs (PP) estimator");
Serial.println("-\n");
float pp_search_voltage = 6; // maximum power_supply_voltage/2
float pp_search_angle = 6*M_PI; // search electrical angle to turn
// move motor to the electrical angle 0
motor.controller = MotionControlType::angle_openloop;
motor.voltage_limit=pp_search_voltage;
motor.move(0);
_delay(1000);
// read the encoder angle
float angle_begin = encoder.getAngle();
Serial.println(angle_begin);
_delay(50);
// move the motor slowly to the electrical angle pp_search_angle
float motor_angle = 0;
while(motor_angle <= pp_search_angle){
motor_angle += 0.01;
motor.move(motor_angle);
}
_delay(1000);
// read the encoder value for 180
float angle_end = encoder.getAngle();
Serial.println(angle_end);
_delay(50);
// turn off the motor
motor.move(0);
_delay(1000);
// calculate the pole pair number
int pp = round((pp_search_angle)/(angle_end-angle_begin));
Serial.print(F("Estimated PP : "));
Serial.println(pp);
Serial.println(F("PP = Electrical angle / Encoder angle "));
Serial.print(pp_search_angle*180/M_PI);
Serial.print("/");
Serial.print((angle_end-angle_begin)*180/M_PI);
Serial.print(" = ");
Serial.println((pp_search_angle)/(angle_end-angle_begin));
Serial.println();
// a bit of monitoring the result
if(pp <= 0 ){
Serial.println(F("PP number cannot be negative"));
Serial.println(F(" - Try changing the search_voltage value or motor/encoder configuration."));
return;
}else if(pp > 30){
Serial.println(F("PP number very high, possible error."));
}else{
Serial.println(F("If PP is estimated well your motor should turn now!"));
Serial.println(F(" - If it is not moving try to relaunch the program!"));
Serial.println(F(" - You can also try to adjust the target voltage using serial terminal!"));
}
// set FOC loop to be used
motor.controller = MotionControlType::torque;
// set the pole pair number to the motor
motor.pole_pairs = pp;
//align encoder and start FOC
motor.initFOC();
_delay(1000);
Serial.println(F("\n Motor ready."));
Serial.println(F("Set the target voltage using serial terminal:"));
}
// uq voltage
float target_voltage = 2;
void loop() {
// main FOC algorithm function
// the faster you run this function the better
// Arduino UNO loop ~1kHz
// Bluepill loop ~10kHz
motor.loopFOC();
// Motion control function
// velocity, position or voltage (defined in motor.controller)
// this function can be run at much lower frequency than loopFOC() function
// You can also use motor.move() and set the motor.target in the code
motor.move(target_voltage);
// communicate with the user
serialReceiveUserCommand();
}
// utility function enabling serial communication with the user to set the target values
// this function can be implemented in serialEvent function as well
void serialReceiveUserCommand() {
// a string to hold incoming data
static String received_chars;
while (Serial.available()) {
// get the new byte:
char inChar = (char)Serial.read();
// add it to the string buffer:
received_chars += inChar;
// end of user input
if (inChar == '\n') {
// change the motor target
target_voltage = received_chars.toFloat();
Serial.print("Target voltage: ");
Serial.println(target_voltage);
// reset the command buffer
received_chars = "";
}
}
}