ok, update. I assumed it was just a problem with the print function and tried to carry on.
The following lines are printed when the motor starts to accelerate from the default start of 2 radians per second, commanded to reach 60 rads per second:
11:46:35.934 -> ,eta[i]64614040.00,eta[i]55865640.00eta_factor:ovfeta[i]:64614040.00x_dot:ovfcurrent_meas_period:4294967.50flux_state_[i]:ovf,eta[i]ovfeta_factor:ovfeta[i]:55865640.00x_dot:ovfcurrent_meas_period:4294967.50flux_state_[i]:ovf,eta[i]ovf,eta[1]:ovf,eta[0]:ovf
11:46:35.934 -> phase:-2.43
11:46:35.934 -> ,eta[i]43315504.00,eta[i]66788448.00eta_factor:ovfeta[i]:43315504.00x_dot:ovfcurrent_meas_period:4294967.50flux_state_[i]:ovf,eta[i]ovfeta_factor:ovfeta[i]:66788448.00x_dot:ovfcurrent_meas_period:4294967.50flux_state_[i]:ovf,eta[i]ovf,eta[1]:ovf,eta[0]:ovf
11:46:35.934 -> phase:-2.15
11:46:35.934 -> ,eta[i]ovf,eta[i]ovfeta_factor:ovfeta[i]:ovfx_dot:ovfcurrent_meas_period:4294967.50flux_state_[i]:ovf,eta[i]ovfeta_factor:ovfeta[i]:ovfx_dot:ovfcurrent_meas_period:4294967.50flux_state_[i]:ovf,eta[i]ovf,eta[1]:ovf,eta[0]:ovf
11:46:35.934 -> phase:1.00
11:46:35.934 -> ,eta[i]ovf,eta[i]ovfeta_factor:ovfeta[i]:ovfx_dot:infcurrent_meas_period:4294967.50flux_state_[i]:inf,eta[i]infeta_factor:ovfeta[i]:ovfx_dot:infcurrent_meas_period:4294967.50flux_state_[i]:inf,eta[i]inf,eta[1]:inf,eta[0]:inf
11:46:35.934 -> phase:-2.36
11:46:35.934 -> ,eta[i]inf,eta[i]infeta_factor:infeta[i]:infx_dot:infcurrent_meas_period:4294967.50flux_state_[i]:nan,eta[i]naneta_factor:infeta[i]:infx_dot:infcurrent_meas_period:4294967.50flux_state_[i]:nan,eta[i]nan,eta[1]:nan,eta[0]:nan
11:46:35.934 -> phase:nan
11:46:35.934 -> ,eta[i]nan,eta[i]naneta_factor:naneta[i]:nanx_dot:nancurrent_meas_period:4294967.50flux_state_[i]:nan,eta[i]naneta_factor:naneta[i]:nanx_dot:nancurrent_meas_period:4294967.50flux_state_[i]:nan,eta[i]nan,eta[1]:nan,eta[0]:nan
11:46:35.934 -> phase:nan
11:46:35.934 -> ,eta[i]nan,eta[i]naneta_factor:naneta[i]:nanx_dot:nancurrent_meas_period:4294967.50flux_state_[i]:nan,eta[i]naneta_factor:naneta[i]:nanx_dot:nancurrent_meas_period:4294967.50flux_state_[i]:nan,eta[i]nan,eta[1]:nan,eta[0]:nan
11:46:35.934 -> phase:nan
11:46:35.934 -> ,eta[i]nan,eta[i]naneta_factor:naneta[i]:nanx_dot:nancurrent_meas_period:4294967.50flux_state_[i]:nan,eta[i]naneta_factor:naneta[i]:nanx_dot:nancurrent_meas_period:4294967.50flux_state_[i]:nan,eta[i]nan,eta[1]:nan,eta[0]:nan
11:46:35.934 -> phase:nan
11:46:35.934 -> ,eta[i]nan,eta[i]naneta_factor:naneta[i]:nanx_dot:nancurrent_meas_period:4294967.50flux_state_[i]:nan,eta[i]naneta_factor:naneta[i]:nanx_dot:nancurrent_meas_period:4294967.50flux_state_[i]:nan,eta[i]nan,eta[1]:nan,eta[0]:nan
11:46:36.071 -> phase:nan
The exact code I’m using is:
#include <SimpleFOC.h>
#include <math.h>
// NUMBER OF POLE PAIRS, NOT POLES, specific to the motor being used!
BLDCMotor motor = BLDCMotor(7);
//this line must be changed for each board
BLDCDriver6PWM driver = BLDCDriver6PWM(A_PHASE_UH, A_PHASE_UL, A_PHASE_VH, A_PHASE_VL, A_PHASE_WH, A_PHASE_WL);
LowsideCurrentSense currentSense = LowsideCurrentSense(0.003, -64.0/7.0, A_OP1_OUT, A_OP2_OUT, A_OP3_OUT);
LowPassFilter diff_filter = LowPassFilter(0.05);
PhaseCurrent_s current1 = currentSense.getPhaseCurrents();
float goal_speed =0;
float v=2;
float v_diff=1;
float accel = 92;// in rads per second per second
float v_per_radsPS = 0.0232;
float accel_v_boost = 0.5;// voltage is increased during acceleration and deacceleration by this amount
bool voltage_override = 1;
float power_figure = 1.5;
float power_coeff = 0.00043;// the serial communicator could actually use an extra digit for this one.
float A, B, C;
float currentlf_now =0;
float prop_V= 0;
float min_V = 1;
float v_limit = 19;
float current_limit_slope = 1.8;// this is in milliamps pre rad per second
float current_limit_o_term = 200;//this is the current limit at zero rps, it may not trip with stall
float maybe_o = 1;
float Va = 0;
float Vb = 0;
void SerialComm(){
if (Serial.available() > 0){
switch(Serial.peek()){
case 't': Serial.read(); Serial.print("t"); Serial.println(goal_speed); break;
case 'c': Serial.read(); Serial.print("c"); Serial.println(accel); break;
case 'v': Serial.read(); Serial.print("v"); Serial.println(motor.voltage_limit, 4); break;
case 'n': Serial.read(); Serial.print("n"); Serial.println(v_diff); break;
case 'p': Serial.read(); Serial.print("p"); Serial.println(v_per_radsPS, 4); break;
case 'b': Serial.read(); Serial.print("b"); Serial.println(accel_v_boost); break;
case 'o': Serial.read(); Serial.print("o"); Serial.println(voltage_override); break;
case 's': Serial.read(); Serial.print("s"); Serial.println(motor.target); break;
case 'f': Serial.read(); Serial.print("f"); Serial.println(power_coeff, 6); break;
case 'g': Serial.read(); Serial.print("g"); Serial.println(currentSense.getDCCurrent(), 5); break;
case 'i': Serial.read(); Serial.print("i"); Serial.println(get_mA(), 4); break;
case 'j': Serial.read(); Serial.print("j"); Serial.println(min_V); break;
case 'w': Serial.read(); Serial.print("w"); Serial.println(driver.voltage_power_supply); break;
case 'k': Serial.read(); Serial.print("k"); Serial.println(v_limit); break;
case 'y': Serial.read(); Serial.print("y"); Serial.println(current_limit_slope); break;
case 'u': Serial.read(); Serial.print("u"); Serial.println(current_limit_o_term); break;
case 'e': Serial.read(); Serial.print("e"); if (motor.shaft_angle >= 0){
Serial.println(motor.shaft_angle, 3);
}
if (motor.shaft_angle < 0){
Serial.println((_2PI-(-1*motor.shaft_angle)), 3);
}
break;
case 'T': break;
case 'C': break;
case 'V': break;
case 'P': break;
case 'B': break;
case 'Y': break;
case 'U': break;
case 'O': break;
case 'F': break;
case 'J': break;
case 'W': ;break;
case 'K': ;break;
default: Serial.read(); break; //if anything we don't recognize got in the buffer, clear it out or it will mess things up.
}
}
if (Serial.available() >= 9){
switch(Serial.read())
{
case 'T': goal_speed = Serial.parseFloat();break;
case 'C': accel = Serial.parseFloat();break;
case 'V': v_diff = Serial.parseFloat(); break;
case 'P': v_per_radsPS = Serial.parseFloat(); break;
case 'K': v_limit = Serial.parseFloat(); break;
case 'B': accel_v_boost = Serial.parseFloat(); break;
case 'Y': current_limit_slope = Serial.parseFloat(); break;
case 'U': current_limit_o_term = Serial.parseFloat(); break;
case 'O':
maybe_o = Serial.parseFloat(); // just in case the wrong data gets in somehow we don't want the voltage going crazy
if (maybe_o < 1){
voltage_override = 0;
}
if (maybe_o >= 0.999){
voltage_override = 1;
}
break;// if it's not one of these, ignore it.
case 'F': power_coeff = Serial.parseFloat();break;
// case 'W': driver.voltage_power_supply = Serial.parseFloat();break;
// case 'J': min_V = Serial.parseFloat();break;
}
}
}
void overcurrent_trip(){// if it stalls this won't help except at higher powers, probably. Just helps prevent disaster
float current_cap = current_limit_o_term + fabs(motor.target)*current_limit_slope;
if (get_mA() > current_cap){
voltage_override = 0;
}
}
float track_return_motor_timing(float v_pA, float v_pB, float current_A, float current_B) {
// Algorithm based on paper: Sensorless Control of Surface-Mount Permanent-Magnet Synchronous Motors Based on a Nonlinear Observer
// http://cas.ensmp.fr/~praly/Telechargement/Journaux/2010-IEEE_TPEL-Lee-Hong-Nam-Ortega-Praly-Astolfi.pdf
// In particular, equation 8 (and by extension eqn 4 and 6).
// The V_alpha_beta applied immedietly prior to the current measurement associated with this cycle
// is the one computed two cycles ago. To get the correct measurement, it was stored twice:
// once by final_v_alpha/final_v_beta in the current control reporting, and once by V_alpha_beta_memory.
// PLL
// TODO: the PLL part has some code duplication with the encoder PLL
// Pll gains as a function of bandwidth
// don't engage the system by calling this function until a suitable RPM is achieved or yu will just get nonsense results
static float V_alpha_beta_memory_[] = {0.0f,0.0f};
static double flux_state_[] = {0.0f,0.0f};
static float last_v_alpha = 0.0f;
static float last_v_beta = 0.0f;
float observer_gain = 200.0f; // IDK what a reasonable starting point is, 1000 is what odrive uses. They use 2500 and 8000 in the pdf doc. Too high and it will bounce around, too low and it will take a long time to catch up with changes.
float O_phase_resistance = 2.9f;// in ohms *presumably
float O_phase_inductance = 0.0006455f; // in henries *presumably
float O_flux_linkage = 0.00931f;// it's in units of webers *presumably, which is ampere-turns? Can be calculated from the peak to peak per hz, which is easy to measure, so find the equation for that and use that to calc it before then use that.*is this per phase or across terminals*??? I measured it across the terminals
static unsigned long last_run_ts = millis();
unsigned long ms_since_last_run = ticks_diff(last_run_ts, millis()) ;
float s_since_last_run = float(ms_since_last_run)/1000.0f ;
float current_meas_period = s_since_last_run ;
// Clarke transform
float one_by_sqrt3 = 0.5773502691f;
float I_alpha_beta[2] = {
current_A,
one_by_sqrt3 * (current_B - (-current_B-current_A))};
// alpha-beta vector operations
double eta[2] = {0.0f,0.0f};
if (get_mA()<100){ // if current measurement is invalid
flux_state_[0] = 0.0f;
flux_state_[1] = 0.0f;
}
for (int i = 0; i <= 1; ++i) {
// y is the total flux-driving voltage (see paper eqn 4)
float y = -O_phase_resistance * I_alpha_beta[i] + V_alpha_beta_memory_[i];
// flux dynamics (prediction)
float x_dot = float(y);
// integrate prediction to current timestep
flux_state_[i] += x_dot * float(current_meas_period);
// eta is the estimated permanent magnet flux (see paper eqn 6)
eta[i] = flux_state_[i] - O_phase_inductance * float(I_alpha_beta[i]);
Serial.print(",eta[i]");
Serial.print(eta[i]);
}
// Non-linear observer (see paper eqn 8):
double pm_flux_sqr = O_flux_linkage * O_flux_linkage;
double est_pm_flux_sqr = (eta[0] * eta[0]) + (eta[1] * eta[1]);
double bandwidth_factor = 1 / pm_flux_sqr;
double eta_factor = 0.5f * (observer_gain * bandwidth_factor) * (pm_flux_sqr - est_pm_flux_sqr);
// alpha-beta vector operations
for (int i = 0; i <= 1; ++i) {
// add observer action to flux estimate dynamics
double x_dot = eta_factor * eta[i];
// convert action to discrete-time
Serial.print("eta_factor:");
Serial.print(eta_factor);
Serial.print("eta[i]:");
Serial.print(eta[i]);
Serial.print("x_dot:");
Serial.print(x_dot);
flux_state_[i] += x_dot * current_meas_period;
// update new eta
Serial.print("current_meas_period:");
Serial.print(current_meas_period);
Serial.print("flux_state_[i]:");
Serial.print(flux_state_[i]);
eta[i] = flux_state_[i] - O_phase_inductance * I_alpha_beta[i];
Serial.print(",eta[i]");
Serial.print(eta[i]);
}
// Flux state estimation done, store V_alpha_beta for next timestep
V_alpha_beta_memory_[0] = last_v_alpha; // still have to figure out exactly what voltage this is so we can sub in the right one
V_alpha_beta_memory_[1] = last_v_beta; // same here
last_v_alpha = v_pA;
last_v_beta = v_pB;
last_run_ts = millis();
Serial.print(",eta[1]:");
Serial.print(eta[1]);
Serial.print(",eta[0]:");
Serial.println(eta[0]);
float phase = atan2(eta[1], eta[0]); // do we have fast_atan available? no
Serial.print("phase:");
Serial.println(phase);
return phase; // the "phase" is the motor timing, in radians presumably, optimal for torque and efficiency is of course pi/2 radians but we need some space to avoid stall too
};
unsigned long int ticks_diff(unsigned long int t2,unsigned long int t1){ //t2 should be after t1, this is for calculating clock times.
if (t2<t1){//t2 must have wrapped around after t1 was taken
return (4294967295-(t1-t2));
}
return (t2-t1);
}
float get_mA(){// this is the estimated current being drawn from the power supply, not the actual motor current which is a bit different
float x =0;
x = currentlf_now*motor.voltage_limit/24;
return 1000*((4.0384440932900223e-002)+3.4514090071108776e-002*x*30);// this is off by like 12 percent in some cases a polynomial of third order fits the data better but might flake out at higher than 500 mA so I didn't try it.
}
void setup() {
Serial.begin(1000000);
Serial.println("test serial2");
// driver config
// power supply voltage [V]
driver.voltage_power_supply = 24;
// driver.dead_zone = 0.1;
driver.init();
// driver.dead_zone = 0.1;
// link the motor and the driver
motor.linkDriver(&driver);
currentSense.linkDriver(&driver);
currentSense.init();
currentSense.skip_align = true;
FOCModulationType::SinePWM;
motor.voltage_limit = 1; // [V]
motor.velocity_limit = 300; // [rad/s]
motor.controller = MotionControlType::velocity_openloop;
// init motor hardware
motor.init();
motor.voltage_limit = 2;
goal_speed = 2;
}
void loop() {
static unsigned long int loop_clock_in = millis();
unsigned long int loop_time = 0;
float loop_time_s = 0;
// unsigned long int inner_loop_time = 0;
loop_time = ticks_diff(millis(), loop_clock_in);
loop_clock_in=millis();
loop_time_s = float(loop_time)/1000;
if (motor.target < goal_speed-(accel*loop_time_s*1.5)){//rps not positive enough
if (motor.target < 0){//counterclockwise rotation, deaccelerating
motor.target = motor.target+accel*loop_time_s*0.7;
motor.move();
prop_V = (v_diff+accel_v_boost+fabs((motor.target*v_per_radsPS))+(power_coeff*pow(fabs(motor.target),power_figure)))*voltage_override;
}
if (motor.target >= 0){ //clockwise rotation, accelerating
motor.target = motor.target+accel*loop_time_s;
motor.move();
prop_V = (v_diff+accel_v_boost+fabs((motor.target*v_per_radsPS))+(power_coeff*pow(fabs(motor.target),power_figure)))*voltage_override;
}
}
if (motor.target>=goal_speed-(accel*loop_time_s*1.5)){//steady run phase
if (motor.target<=goal_speed+(accel*loop_time_s*1.5)){
motor.move();
prop_V = (v_diff+fabs((motor.target*v_per_radsPS))+(power_coeff*pow(fabs(motor.target),power_figure)))*voltage_override; //constant run
}
}
if (motor.target > goal_speed + (accel*loop_time_s*1.5)){ //rps too positive
if (motor.target > 0){ //clockwise rotation, deaccelerating
motor.target = motor.target-accel*loop_time_s*0.7;
motor.move();
prop_V = (v_diff+accel_v_boost+fabs((motor.target*v_per_radsPS))+(power_coeff*pow(fabs(motor.target),power_figure)))*voltage_override;
}
if (motor.target <= 0){
motor.target = motor.target-accel*loop_time_s; //counterclockwise rotation, accelerating
motor.move();
prop_V = (v_diff+accel_v_boost+fabs((motor.target*v_per_radsPS))+(power_coeff*pow(fabs(motor.target),power_figure)))*voltage_override;
}
}
if (prop_V < min_V){
motor.voltage_limit = min_V*voltage_override;
}
else {
motor.voltage_limit = prop_V;
}
if (prop_V > v_limit){
motor.voltage_limit = v_limit;
}
for (int i=0;i<10;i++){ // shouldloop at about 37 khz on b-g431 board
for (int q=0;q<5;q++){
motor.move();
motor.move();
motor.move();
motor.move();
motor.move();
}
// Serial.println(micros()-inner_loop_time);
// inner_loop_time = micros();
SerialComm();
}
current1 = currentSense.getPhaseCurrents();
A = current1.a;
B = current1.b;
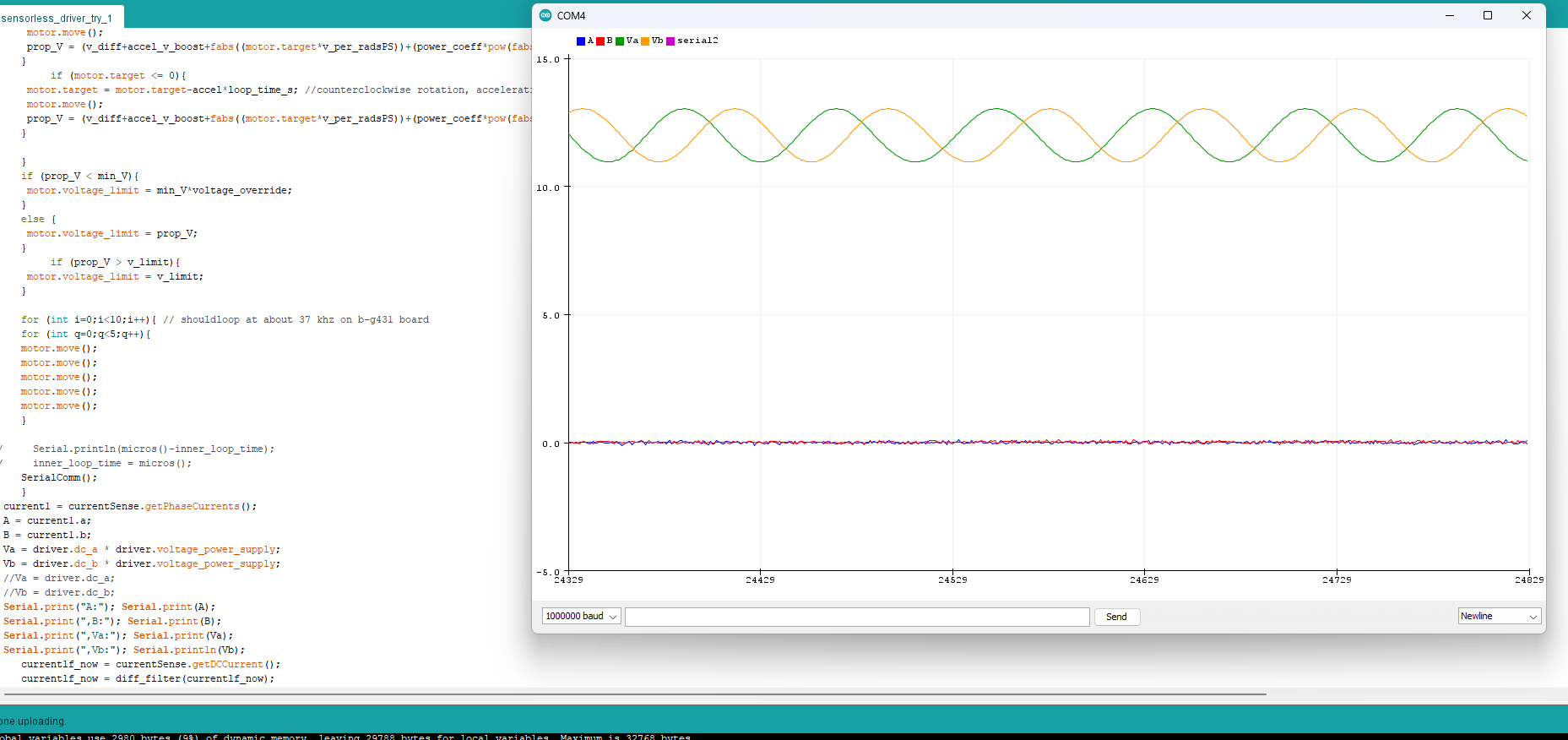
Va = driver.dc_a * driver.voltage_power_supply;
Vb = driver.dc_b * driver.voltage_power_supply;
//Va = driver.dc_a;
//Vb = driver.dc_b;
// Serial.print("A:"); Serial.print(A);
//Serial.print(",B:"); Serial.print(B);
// Serial.print(",Va:"); Serial.print(Va);
// Serial.print(",Vb:"); Serial.print(Vb);
track_return_motor_timing(Va, Vb, A, B);
currentlf_now = currentSense.getDCCurrent();
currentlf_now = diff_filter(currentlf_now);
overcurrent_trip();
}
Same as before, just print statements in different places. If this keeps up much longer I’ll have to learn to use the debugging features of arduino, I guess, but IDK if they really give you a record of exactly what happened. Print is more flexible in some ways, just kind of slow to explore possibilities.
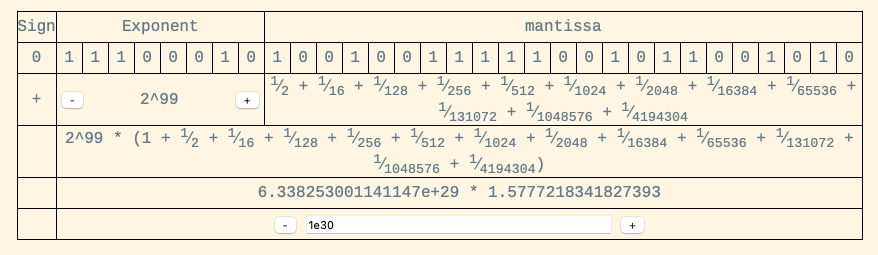
So basically the first time inf appears, which then propagates down and turns into a nan, is when two numbers eta_factor and eta[0] are multiplied by each other. They are both floating point, probably double precision floating point. I can’t see their values because print can’t print them. But multiplying two perfectly good floating point values should never really give an inf???