Interesting, there are many parallels with PID controllers, I guess it’s similar mass-spring type systems. Using a capacitor with a high ESR is not quite the same as using the snubber as they indicate though, as the resistor is de factor connected in different places. I think the snubber is better but there could be a similar issue with the interaction of inductance and capacitance during sudden loads on the capacitor just as much as sudden charging of the capacitor. As with PWM of the mosfets in a motor driver, concievably. I wonder if this is related to the issues the Lepton 2.0 experienced with noise on the input pins of the microcontroller…
Here’s another good video on the topic

My solution is to use a similar circuit to my reverse voltage circuit, like the top answer here.
However, this circuit does create problems for the 3.3V regulator so that had to be addressed with this circuit…

In the end, I think I will stick with the aluminum electrolytic caps for most projects in the future, especially if they are not permanently hardwired
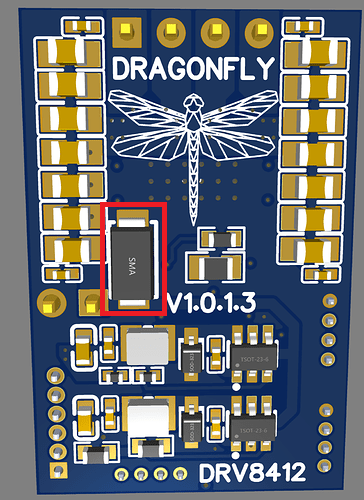
In my circuit that’s exactly what the ESD component does (circled in red).
Please read the schematics first and carefully consider all components before you spend too much time theorizing what a hypothetical problem the circuit might have. Then fab the circuit and thoroughly test it, then please post your results here for others to learn.
Adding a resistor is a bad idea as you will most probably set your board on fire due to the massive current draw from the mosfets at 20kHz which will turn your circuit into an RC space heater, unless you select a very large power resistor with a heatsink, which will kill your efficiency, when you were just trying to shave off the initial power-up spike.
Ideally you must protect the digital components with a proper filter in addition to the ESD, as I did in the Qvadrant board, and also split the ground, but that will cost you.

I really like this discussion, it’s very educational!
Cheers,
Valentine
3 Likes