I think I have an idea why Vd*Id makes it worse.
In this post I was showing that a delay between current measurement and angle measurement wrongly increases the measured Id.
It’s glued using shoe goo to the actual motor. It trips when the motor gets too hot, it’s not a breaker that trips when too much current flows, it’s a thermal breaker that trips when the temperature gets above 65 degrees C.
With stepper motors, yes, disconnecting a phase from the driver will actually usually fry the driver, but this does not appear to be a problem with these 3 phase motor drivers, probably because the inductance of the coils is much lower.
It could definitely be a problem for the driver! this is not the recommended technique for this, it should be software cutting power or kill power to the input of the driver, not the outputs of the half-bridges.
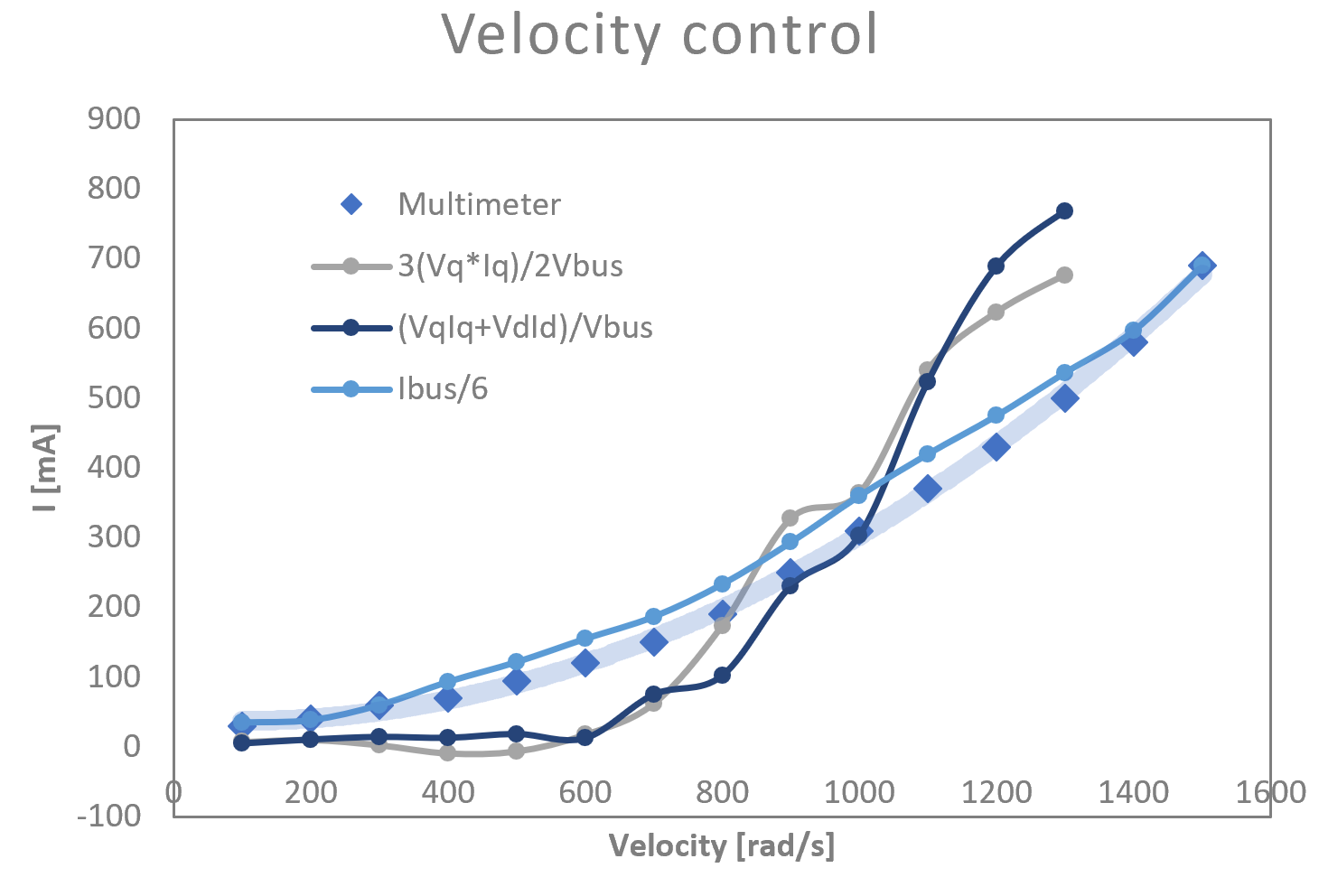
@Candas1, I have tried your branch, thank you very much. I don’t notice any difference in the current measure, regardless of torque/velocity control. What were you hoping to see? I’ll keep digging to see if I can get total bus current, which is important for efficiency measures of the whole system in my case.