Here is the spammer again.
Wanted to share something I used last few days for learning purpose.
It’s clearly not a scientific tool but gives a good intuition about how FOC works.
It’s a very simplified FOC simulation in a gsheet
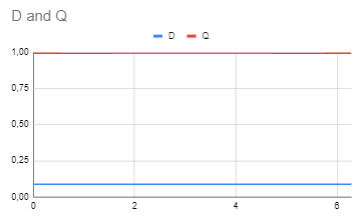
In the Phase current to DG tab:
If you enter a different gain for phase A (e.g. 1,1), this makes D/Q currents wobbly, the PIs will have to compensate this. With good hardware I guess it shouldn’t happen.
If you enter a delay (e.g. 0,1), it introduces a lag between the rotor angle and the sensor angle, this shows not measuring the current and the position at the same time can introduce an error in D and Q (a little) current measurement, reducing the efficiency.
Because Ia+Ib+Ic= 0 (Kirchhoff’s law), only 2 phase currents are enough for FOC.
But why do we even measure 3 currents then ?
In reality, the total of phase currents don’t add up to 0 because of inaccuracies in hardware, and noise during sampling. One of the reasons why it’s useful to have 3 phase currents is that this can be used to slightly reduce the noise by sharing this error between the 3 phase currents: