MKS FOC DUAL PLUS v3.3 Inline current sense with INA240A2
AS5600 I2C 400kHz (tried faster and slower
750KV WYE 0.22Ohms (0.182Ohms 4 wire measurement) 0,031mH motors.
I’m getting inconsistent Pole Pair checks
Inconsistent current sense alignments (switch phases, invert them, all currents same magnitude…)
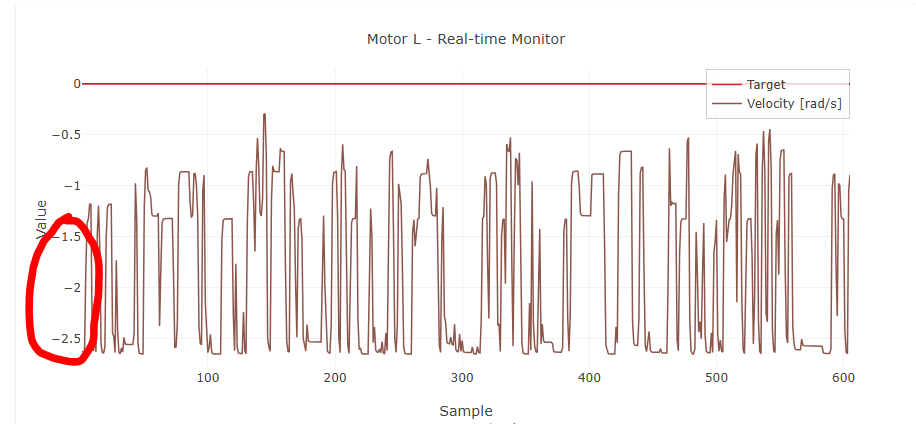
When in the webcontroller i set the target to zero in all motion and torque modes.
When setting the KV and induction parameters to 0 for the phase resistance testing the motor starts spinning with full current and horrendous noise. Setting PID’s to zero does nothing to stop the motor.
I’m really starting to run out of ideas and motivation.
#include <SimpleFOC.h>
#define PowerSupplyVoltage 12;
#define DriVolLim 2;
#define MotVolSenAli 1;
#define MotVolLim 12;
#define MotCurLim 1;
#define Skip_current_align false;
char motor0_id = 'L';
char motor1_id = 'R';
BLDCMotor motor0 = BLDCMotor(7, 0.182, 750, 0.03, 0.03);
BLDCMotor motor1 = BLDCMotor(7, 0.182, 750, 0.03, 0.03);
BLDCDriver3PWM driver0 = BLDCDriver3PWM(32, 33, 25);
BLDCDriver3PWM driver1 = BLDCDriver3PWM(26, 27, 14);
MagneticSensorI2C sensor0 = MagneticSensorI2C(AS5600_I2C);
MagneticSensorI2C sensor1 = MagneticSensorI2C(AS5600_I2C);
InlineCurrentSense current_sense0 = InlineCurrentSense(0.01f, 50.0f, 39, 36, _NC);
InlineCurrentSense current_sense1 = InlineCurrentSense(0.01f, 50.0f, 35, 34, _NC);
Commander command0 = Commander(Serial);
void doMotor0(char* cmd){command0.motor(&motor0, cmd);}
void doMotor1(char* cmd){command0.motor(&motor1, cmd);}
void setup() {
Serial.begin(115200);
delay(2000);
Serial.println();
Serial.println("Start!");
Serial.println("Starting Serial");
SimpleFOCDebug::enable(&Serial);
Wire.setClock(400000);
Wire.begin(19, 18, (uint32_t)400000);
Wire1.setClock(400000);
Wire1.begin(23, 5, (uint32_t)400000);
sensor0.init(&Wire);
sensor1.init(&Wire1);
motor0.linkSensor(&sensor0);
motor1.linkSensor(&sensor1);
driver0.pwm_frequency = 15000;
driver0.voltage_power_supply = PowerSupplyVoltage;
driver0.voltage_limit = DriVolLim;
driver1.pwm_frequency = 15000;
driver1.voltage_power_supply = PowerSupplyVoltage;
driver1.voltage_limit = DriVolLim;
driver0.init();
driver1.init();
motor0.linkDriver(&driver0);
motor1.linkDriver(&driver1);
current_sense0.linkDriver(&driver0);
current_sense1.linkDriver(&driver1);
motor0.torque_controller = TorqueControlType::estimated_current;
motor0.foc_modulation = FOCModulationType::SpaceVectorPWM;
motor0.voltage_sensor_align = MotVolSenAli;
motor0.voltage_limit = MotVolLim;
motor0.current_limit = MotCurLim;
motor0.useMonitoring(Serial);
motor0.monitor_variables = _MON_TARGET | _MON_VEL | _MON_ANGLE | _MON_TARGET | _MON_VOLT_Q | _MON_VEL | _MON_ANGLE;
motor0.monitor_downsample = 10;
motor0.monitor_start_char = motor0_id;
motor0.monitor_end_char = motor0_id;
motor1.torque_controller = TorqueControlType::estimated_current;
motor1.foc_modulation = FOCModulationType::SpaceVectorPWM;
motor1.voltage_sensor_align = MotVolSenAli;
motor1.voltage_limit = MotVolLim;
motor1.current_limit = MotCurLim;
motor1.useMonitoring(Serial);
motor1.monitor_variables = _MON_TARGET | _MON_VEL | _MON_ANGLE | _MON_TARGET | _MON_VOLT_Q | _MON_VEL | _MON_ANGLE;
motor1.monitor_downsample = 10;
motor1.monitor_start_char = motor1_id;
motor1.monitor_end_char = motor1_id;
command0.verbose = VerboseMode::machine_readable;
motor0.init();
motor1.init();
current_sense0.init();
current_sense1.init();
motor0.linkCurrentSense(¤t_sense0);
motor1.linkCurrentSense(¤t_sense1);
current_sense0.gain_a *=-1;
current_sense0.gain_b *=-1;
current_sense1.gain_a *=-1;
current_sense1.gain_b *=-1;
current_sense0.skip_align = Skip_current_align;
motor0.initFOC();
current_sense1.skip_align = Skip_current_align;
motor1.initFOC();
command0.add(motor0_id,doMotor0,"motor 0");
command0.add(motor1_id,doMotor0,"motor 1");
motor0.loopFOC();
motor0.move(0);
motor0.monitor();
motor0.disable();
motor1.loopFOC();
motor1.move(0);
motor1.monitor();
motor1.disable();
Serial.println("Starting main loop");
}
void loop() {
motor0.loopFOC();
motor0.move();
motor0.monitor();
motor1.loopFOC();
motor1.move();
motor1.monitor();
command0.run();
}
Start!
Starting Serial
ESP32-DRV: Configuring 3PWM in group: 0 on timer: 0
ESP32-DRV: Configuring 2 operators.
ESP32-DRV: Configuring 3 comparators.
ESP32-DRV: Configuring 3 generators.
ESP32-DRV: Configuring center-aligned pwm.
ESP32-DRV: Enabling timer: 0
ESP32-DRV: MCPWM configured!
ESP32-DRV: Configuring 3PWM in group: 1 on timer: 0
ESP32-DRV: Configuring 2 operators.
ESP32-DRV: Configuring 3 comparators.
ESP32-DRV: Configuring 3 generators.
ESP32-DRV: Configuring center-aligned pwm.
ESP32-DRV: Enabling timer: 0
ESP32-DRV: MCPWM configured!
MOT:Monitor enabled!
MOT:Monitor enabled!
MOT:Init
MOT:Enable driver.
MOT:Init
MOT:Enable driver.
ESP32-CS: Configuring ADC1 channel 3
ESP32-CS: Configuring fast ADCs
ESP32-CS: Configuring ADC1 channel 0
ESP32-CS: Configuring fast ADCs
ESP32-CS: Configuring ADC1 channel 7
ESP32-CS: Configuring fast ADCs
ESP32-CS: Configuring ADC1 channel 6
ESP32-CS: Configuring fast ADCs
MOT:Align sensor.
MOT:sensor dir: CW
MOT:PP check: OK!
Skip dir calib.
MOT:Zero elec. angle: 2.14
MOT:Align current sense.
CS: Switch B-(C)NC
CS: Inv C
MOT:Success: 4
MOT:Ready.
MOT:Align sensor.
MOT:sensor dir: CCW
MOT:PP check: OK!
Skip dir calib.
MOT:Zero elec. angle: 2.18
MOT:Align current sense.
CS: Switch A-(C)NC
CS: Err B - all currents same magnitude!
ERR-MOT:Align error!
ERR-MOT:Init FOC fail
Starting main loop
L0.0000 0.0000 0.0000 1.5355L
R0.0000 0.0000 0.0024 -4.8044R
L0.0000 0.0000 0.0000 1.5355L
R0.0000 0.0000 -0.0858 -4.8060R