I am clearly doing something way wrong, but I’m at a loss as to what it is.
I’ve blown up a wide variety of different boards using different driver architectures from different manufacturers while trying to do basic things, so clearly I’m doing something wrong.
I am trying to drive these single pole BLDC motors.
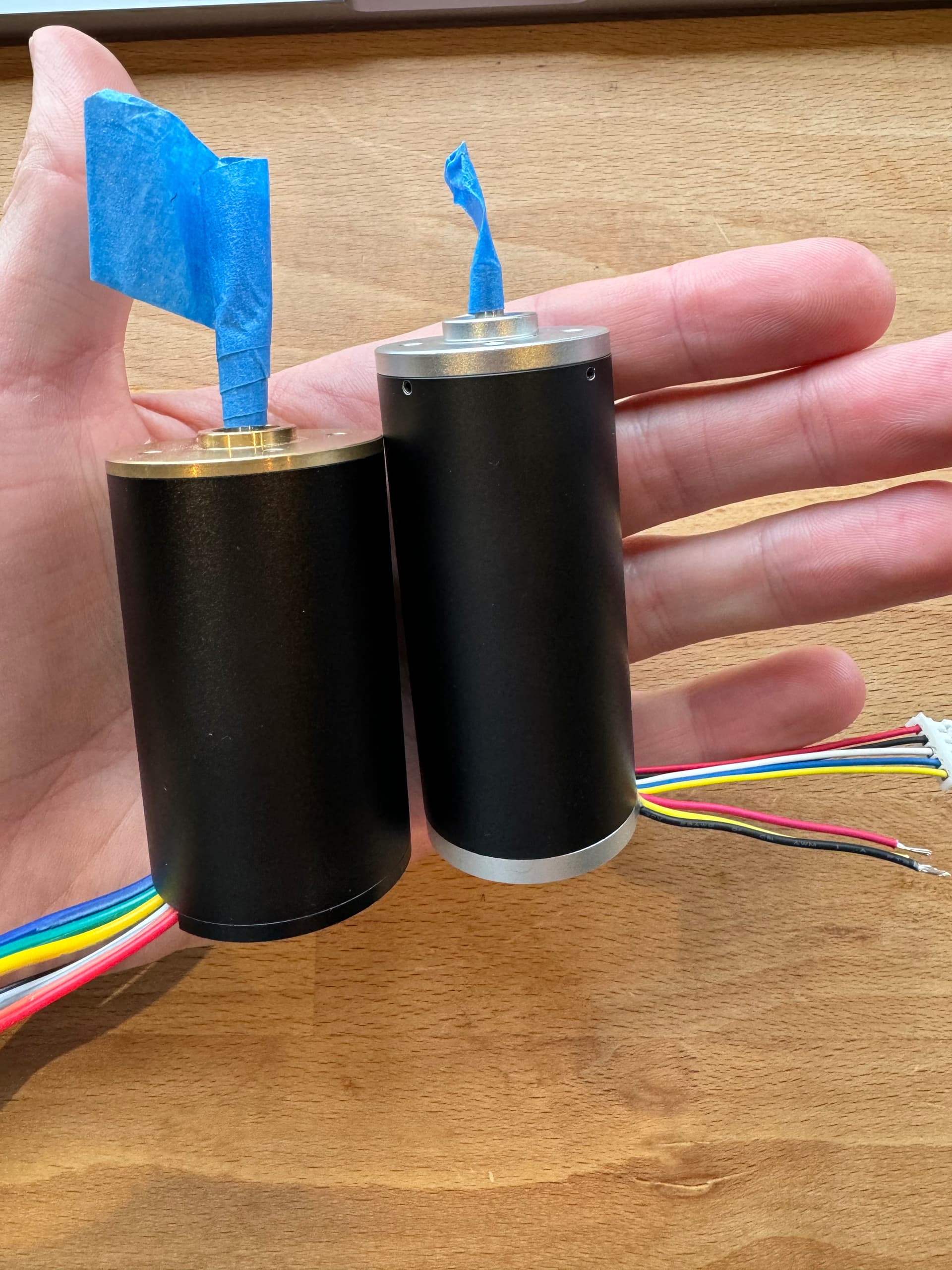
The only thing which seems to stand out about them is that they are pretty low impedance..1.3ohms between each pair of windings.
Whenever I try to drive them they seem to more or less immediately smoke the driver boards.
Most recently I’ve been testing this board: GitHub - makerbase-motor/MKS-ESP32FOC at MKS-ESP32-FOC-V1.0
Running one of their example programs but with the parameters adjusted to match my setup.
/// MKS ESP32 FOC Open loop speed control example; Test Library:SimpleFOC 2.1.1 ; Tested hardware:MKS ESP32 FOC V1.0
/// Enter "T+number" in the serial port to set the speed of the two motors.For example, to set the motor to rotate at a speed of 10rad/s, input "T10"
/// When the motor is powered on, it will rotate at 5rad/s by default
/// When using your own motor, do remember to modify the default number of pole pairs, the value in BLDCMotor(7).
/// The default power supply voltage of the program is 12V.
/// Please remember to modify the voltage_power_supply , voltage_limit variable values when using other voltages for power supply
#include <SimpleFOC.h>
BLDCMotor motor = BLDCMotor(20); //According to the selected motor, modify the number of pole pairs here, the value in BLDCMotor()
BLDCDriver3PWM driver = BLDCDriver3PWM(32,33,25,22);
/// BLDC motor & driver instance
BLDCMotor motor1 = BLDCMotor(20); //Also modify the value in BLDCMotor() here
BLDCDriver3PWM driver1 = BLDCDriver3PWM(26,27,14,12);
/// Target Variable
float target_velocity = 5;
/// Serial Command Setting
Commander command = Commander(Serial);
void doTarget(char* cmd) { command.scalar(&target_velocity, cmd); }
void setup() {
driver.voltage_power_supply = 24; //According to the supply voltage, modify the value of voltage_power_supply here
driver.init();
motor.linkDriver(&driver);
motor.voltage_limit = 1; // [V] //According to the supply voltage, modify the value of voltage_limit here
motor.velocity_limit = 40; // [rad/s]
driver1.voltage_power_supply = 24; //Also modify the value of voltage_power_supply here
driver1.init();
motor1.linkDriver(&driver1);
motor1.voltage_limit = 1; // [V] //Also modify the value of voltage_limit here
motor1.velocity_limit = 40; // [rad/s]
// Open Loop Control Mode Setting
motor.controller = MotionControlType::velocity_openloop;
motor1.controller = MotionControlType::velocity_openloop;
// Initialize the Hardware
motor.init();
motor1.init();
// Add T Command
// Enter "T+number" in the serial port to set the speed of the two motors.For example, to set the motor to rotate at a speed of 10rad/s, input "T10".
command.add('T', doTarget, "target velocity");
Serial.begin(115200);
Serial.println("Motor ready!");
Serial.println("Set target velocity [rad/s]");
_delay(1000);
}
void loop() {
motor.move(target_velocity); //When the motor is powered on, it will rotate at 5rad/s by default
motor1.move(target_velocity);
//User Newsletter
command.run();
}
Plugging the power in insta kills the driver board.
Does anyone have a suggestion about where I might be going wrong?