Hello!
I wanted to find out numer of pole pairs of my motor, so I screwed the motor into the drill and turned it to 840rpm, between two phases I measured 99Hz, so there should be 60*99/840=7 pole pairs, right?
Then I connected to velocity openloop, set 7 pole pairs and motor.target=10
I started measuring velocity
if (currentMillis - previousMillis >= 1000) {
previousMillis = currentMillis;
static float a;
static float a_prev;
a = sensor.getAngle();
float w = (a_prev-a);
Serial1.println(w);
a_prev = a;
}
![]()
I’m getting w~20, like it should be 3,5 pole pair?
it is measured every 1 second (checked it)
what’s wrong then?
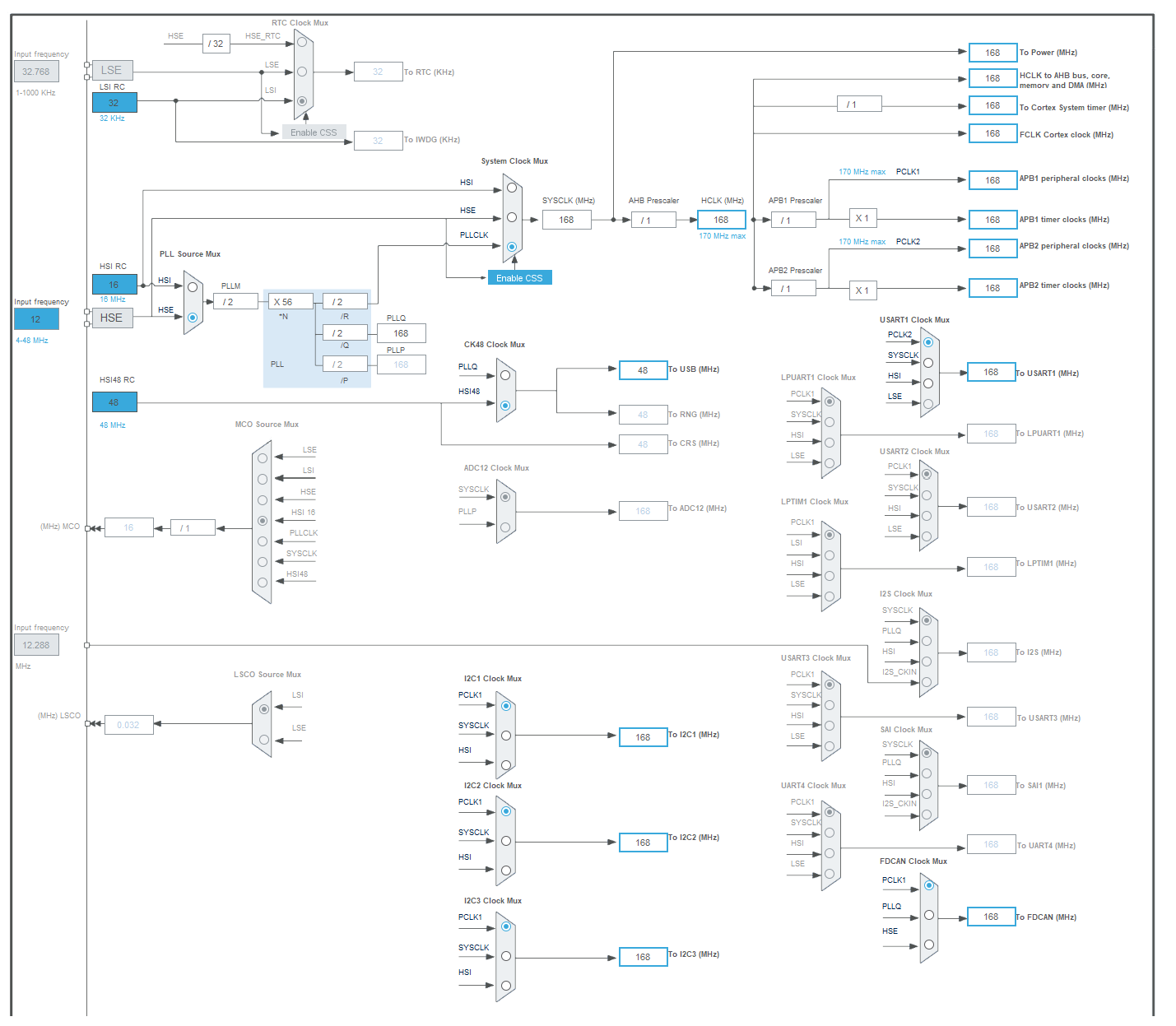
i’m using -D HSE_VALUE=12000000U
but without it behaves like it’s made for 24MHz, so maybe library timers are set for that clock?
how can i check and change it?
usart, delays, millis works well
[env:genericSTM32G431VB]
platform = ststm32
board = genericSTM32G431VB
framework = arduino
board_build.ldscript = ./variant/ldscript.ld
upload_protocol = stlink
lib_archive = false
monitor_speed = 115200
monitor_eol = LF
build_unflags = -Os
build_flags =
-Ofast
-D SIMPLEFOC_STM32_DEBUG
-D ARDUINO_GENERIC_G431VBTX
-D HSE_VALUE=12000000U
-D ARDUINO_GENERIC_G431CBUX
-DSERIAL_UART_INSTANCE=1
-D HAL_OPAMP_MODULE_ENABLED
-DSIMPLEFOC_STM32_DEBUG
-DPIO_FRAMEWORK_ARDUINO_ENABLE_CDC
-DUSBD_USE_CDC
-DUSBCON
lib_deps =
adafruit/Adafruit NeoPixel@^1.11.0
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};
/** Configure the main internal regulator output voltage
*/
HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1_BOOST);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI48|RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSI48State = RCC_HSI48_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV2;
RCC_OscInitStruct.PLL.PLLN = 28;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV4;
RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK)
{
Error_Handler();
}
//Initializes the peripherals clocks
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_USART1|RCC_PERIPHCLK_I2C1
|RCC_PERIPHCLK_I2C2|RCC_PERIPHCLK_I2C3
|RCC_PERIPHCLK_USB|RCC_PERIPHCLK_ADC12
|RCC_PERIPHCLK_FDCAN;
PeriphClkInit.Usart1ClockSelection = RCC_USART1CLKSOURCE_PCLK2;
PeriphClkInit.I2c1ClockSelection = RCC_I2C1CLKSOURCE_PCLK1;
PeriphClkInit.I2c2ClockSelection = RCC_I2C2CLKSOURCE_PCLK1;
PeriphClkInit.I2c3ClockSelection = RCC_I2C3CLKSOURCE_PCLK1;
PeriphClkInit.FdcanClockSelection = RCC_FDCANCLKSOURCE_PCLK1;
PeriphClkInit.UsbClockSelection = RCC_USBCLKSOURCE_HSI48;
PeriphClkInit.Adc12ClockSelection = RCC_ADC12CLKSOURCE_SYSCLK;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
{
Error_Handler();
}
}
I tried to change
RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV2;
to
RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV1;
with deleting -D HSE_VALUE=12000000U but then STM stops and doesn’t do main loop ![]()