I’ve been making slow progress. Still not spinning in foc_current mode yet, but I think it’s just a matter of parameter tuning at this point. I’m using the flux observer which is more finicky than a regular sensor setup. I’m fairly confident that the hardware design is all good.
I decided to use this board on my milling machine spindle, with the hope that it can handle higher current than the B-G431B-ESC1. Cut it in half to reduce the size a bit, since I only need one motor.
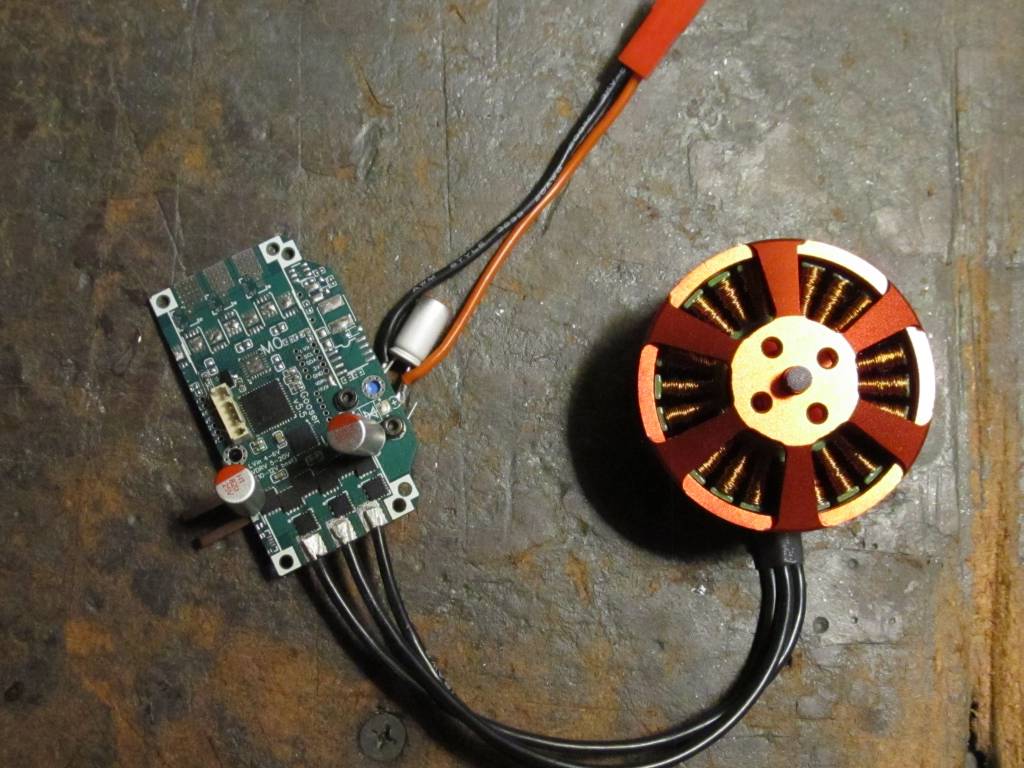
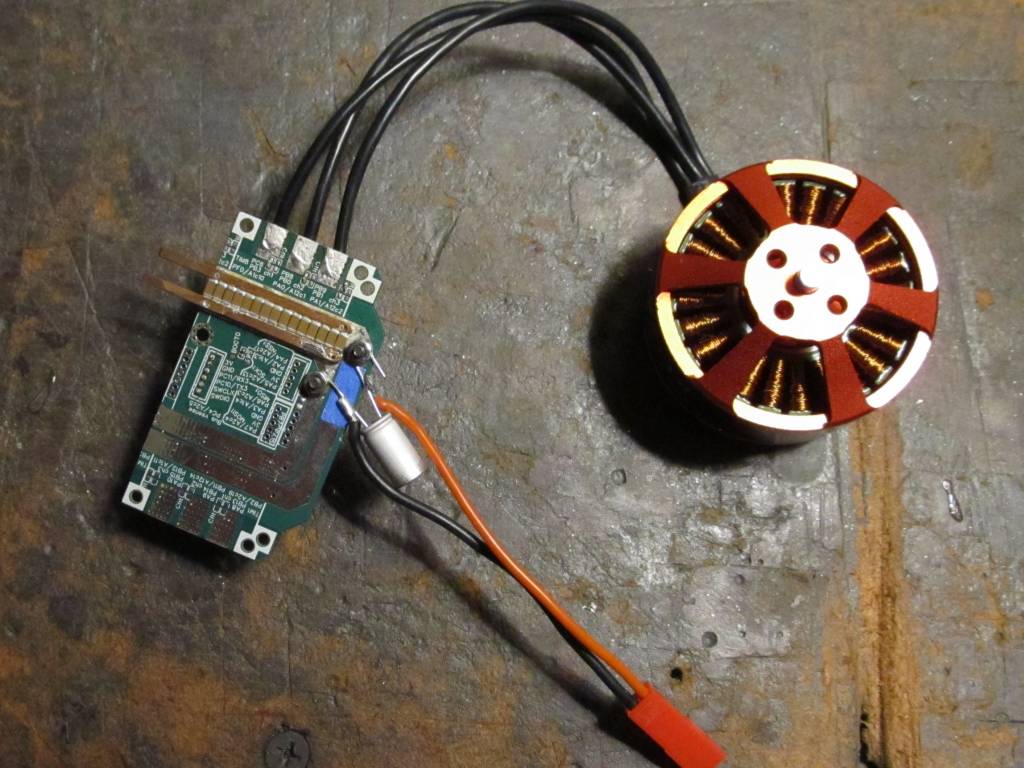
I added copper bars and ceramic capacitors on the back, and electrolytics on the front, with their legs going through holes in the bars to serve as pins to improve the mechanical strength of the solder joints. Close to 2000uF total, which is probably overkill, but the power supply wires are fairly long so it may need it. Heat gun and soldering iron together works well for the copper bars.
I had some soldering problems with the current sensors, but all are working now. The readings are sinusoidal when running in open loop, though phase A gives ~5% higher amplitude signal than the others, so I’m just using phases B and C for now. The d/q noise level seems to be consistent throughout the rotation, so 3 sensors may be superfluous anyway.