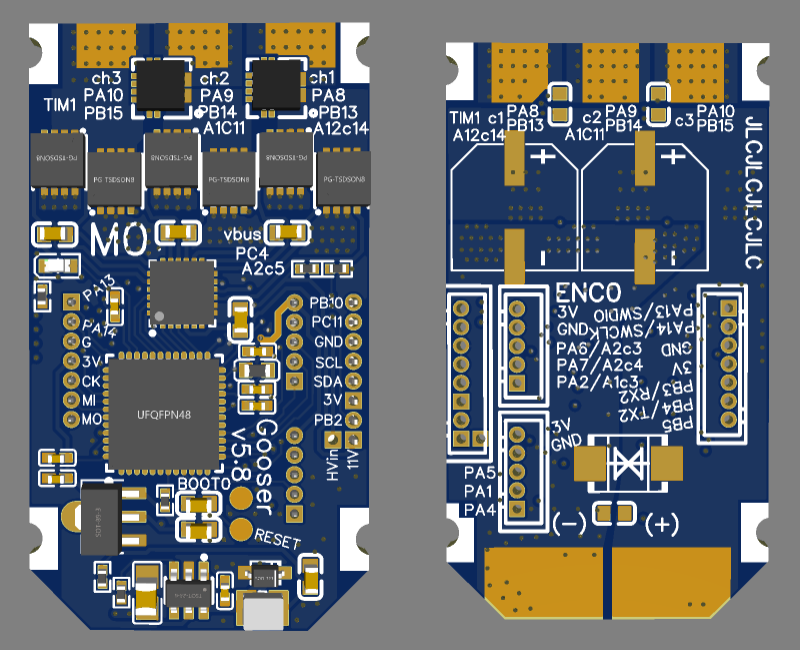
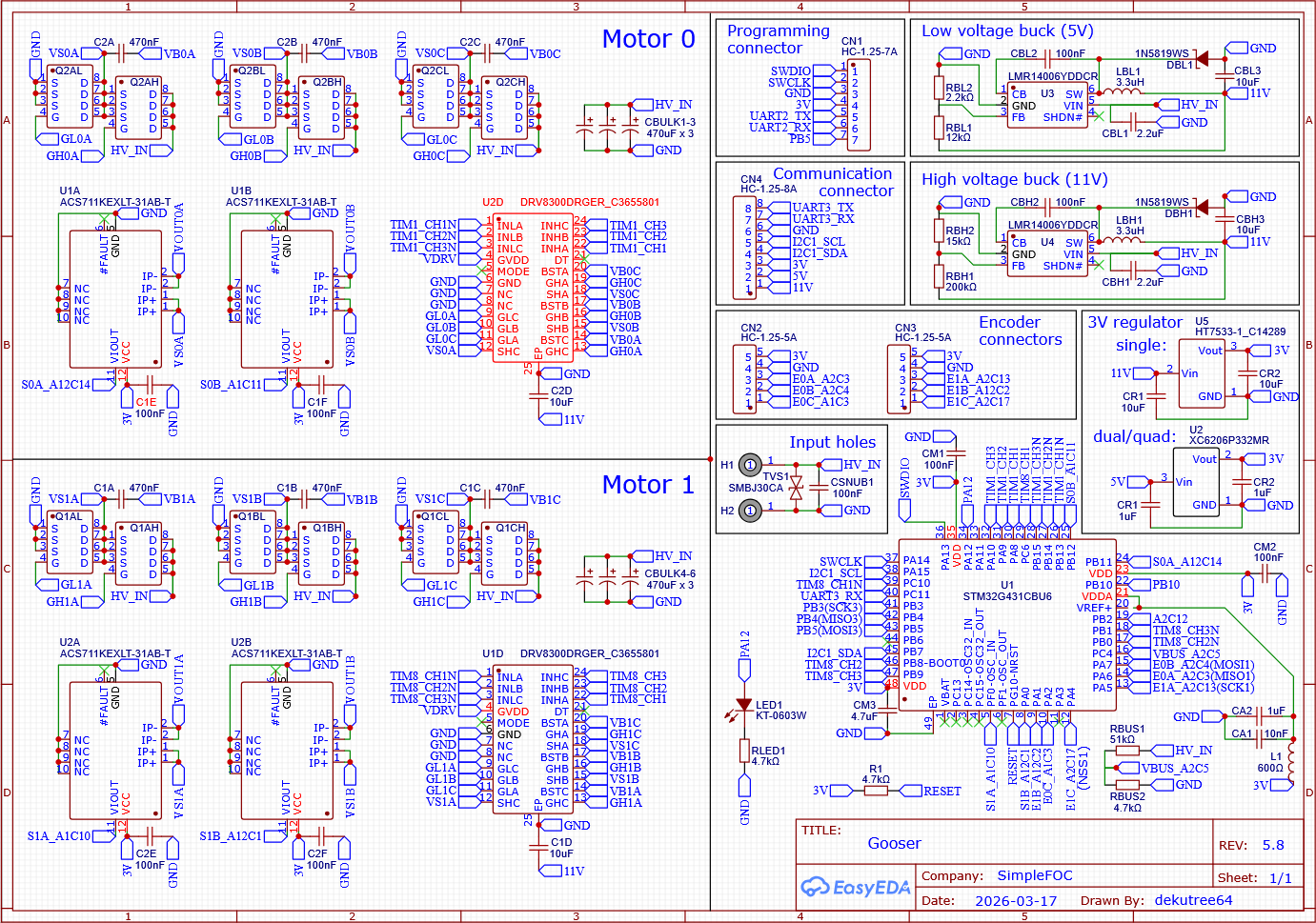
At last it’s complete! This is hopefully the final incarnation of Gooser.
I decided to retain v5.7 as a separate project and create a new one for v5.8. The v5.7 URL is gooser4_copy, which always annoyed me ![]()
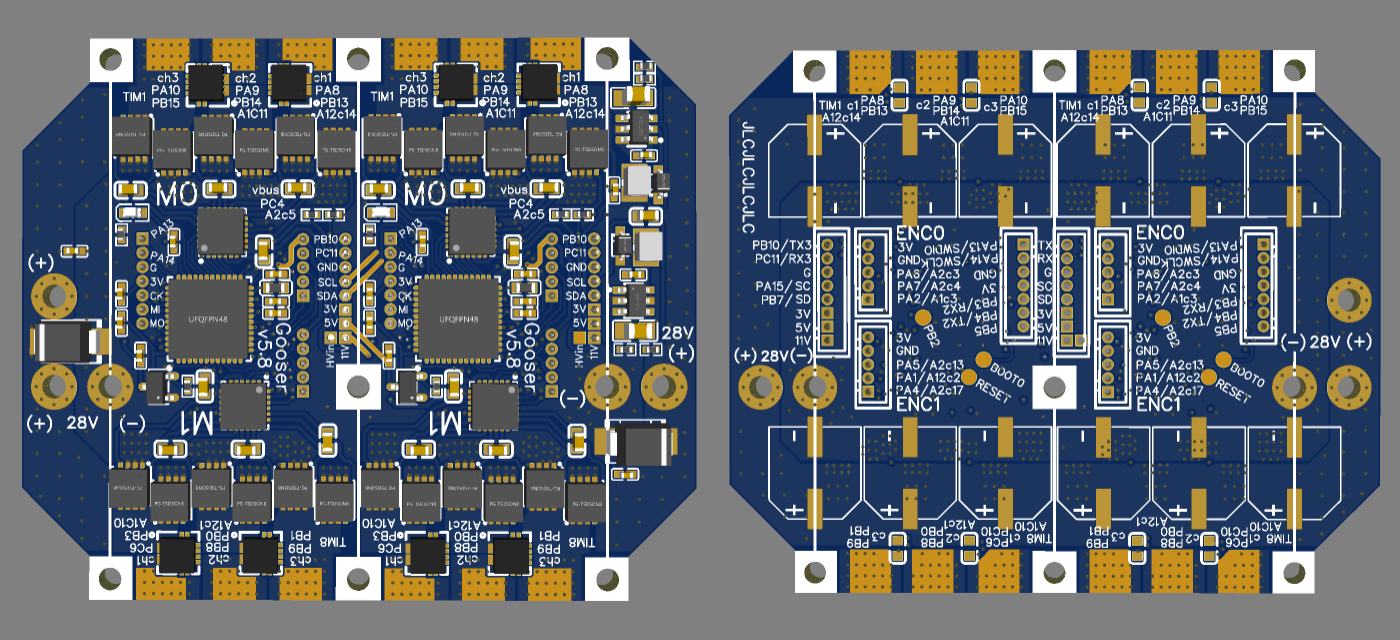
- Increased the width of the tileable area by 1mm because Infineon mosfets were really crammed together (fine for hand assembly, but probably too tight for a machine)
- Changed mosfets to BSZ0500 (BSZ0901 runs much cooler than JMSL0302, but is NRND and this looks to be Infineon’s replacement for it)
- Changed the aux pin header to a proper communication connector
- Added more GPIO and reworked pins to give more SPI and UART options
- Added an LED controlled by PA12
- Changed HV buck to use the same IC and inductor as LV buck, reducing cost and board size
- Removed LV buck on single-motor version, and moved HV buck so it doesn’t increase board width
- Reverted to the smaller 3V regulator, except on the single-motor version
- Renamed VDRV and LVin to 11V and 5V
- Renamed the phase A,B,C order because the old way was confusing
- Shuffled the encoder pins to work nicely with STM32HWEncoder
- No more large exposed areas for copper bars. Just pads for SMD electrolytics, and alternative pads for soldering through-hole type electrolytics sticking off the side of the board (easier than SMD).
- Single-motor no longer has power input holes. Instead I’ve modified the bottom layer copper areas so the left half is HV_IN, allowing wires to be soldered to the board at the bottom edge like a typical ESC.
A few months ago I succumbed to peer pressure and made a version with CAN transceiver. It was a terrible struggle to squeeze it in, and even after achieving victory, I found that I wasn’t happy. What it really needed was more GPIO, and the CAN pins can’t be used for anything else. Besides, CAN is not much benefit for a design like Gooser where all the drivers are located near the battery, so I repurposed its two pins and added one more to the programming connector as well. I could have added two, but that would make the programming and communication connectors look identical, which opens up the possibility to accidentally plug a cable into the wrong one and fry something with the 11V and 5V pins.
When I tried using two SPI encoders on my CNC, it was confusing getting them both connected to the shared SPI pins among the two encoder connectors. Now there are two alternatives: One encoder utilizing both encoder connectors and the other on the programming connector, or both on the programming connector (which would still involve making a splitter cable, but a less confusing one than before). You do have to configure SWDIO and/or SWCLK as GPIO, and thus use the reset touchpad for programming, but that’s not such a big deal.
Having a second UART interface on the communication connector means you can still configure and debug it while the programming connector is in use by encoders.