Hi everyone,
I’m currently facing an issue initializing FOC with the following setup:
 Hardware setup:
Hardware setup:
- Motor: iPower GM6208-150T (Gimbal motor – 28 poles according to datasheet)
- Encoder: AMT103 with A/B output (2048 PPR) microswitch set 0000 → 2048
- Board: STM32 Nucleo F446RE
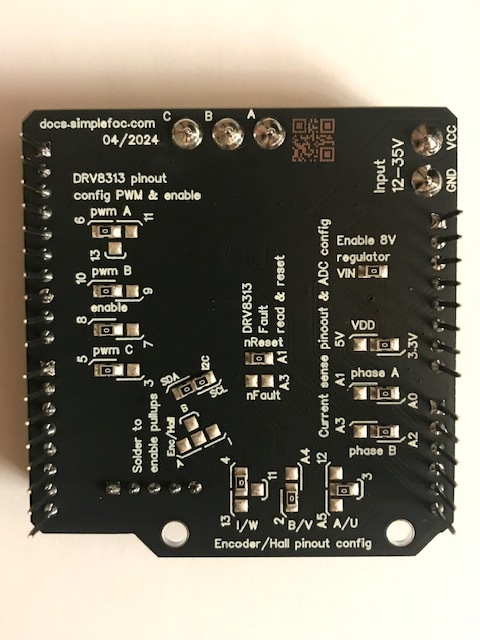
- Driver: SimpleFOC Shield v3.2 (soldered for 3PWM: pins D6, D10, D5 with ENABLE on D8)
- IDE: Arduino IDE 2.3.6 with STM32 board package (STM32F4 / Nucleo-64 F446RE)
![]() Encoder connections:
Encoder connections:
- A = D3
- B = D2
- I = D4
 Code:
Code:
I’m using a slightly modified version of the angle_control.ino example. Key lines:
BLDCMotor motor = BLDCMotor(28); // 28 pole pairs (based on datasheet)
BLDCDriver3PWM driver = BLDCDriver3PWM(6, 10, 5, 8); // 3PWM + ENABLE
Encoder sensor = Encoder(3, 2, 2048, 4); // I’ve tested with and without index
On startup, the motor turns one full rotation (clockwise, from encoder side), but then I get the following output.
![]() Serial output with index enabled:
Serial output with index enabled:
STM32-DRV: Restarting timer 4
STM32-DRV: Restarting timer 3
MOT: Monitor enabled!
MOT: Init
MOT: Enable driver.
MOT: Align sensor.
MOT: Index search…
MOT: Error: Not found!
MOT: Init FOC failed.
Motor ready.
Set the target angle using serial terminal:
![]() Serial output without index (i.e. using only A/B):
Serial output without index (i.e. using only A/B):
BLDCMotor motor = BLDCMotor(28); // 28 pole pairs (based on datasheet)
BLDCDriver3PWM driver = BLDCDriver3PWM(6, 10, 5, 8); // 3PWM + ENABLE
Encoder sensor = Encoder(3, 2, 2048); // I’ve tested with and without index
MOT: sensor_direction==CW
MOT: PP check: fail - estimated pp: 14.81
MOT: Zero elec. angle: 4.26
MOT: No current sense.
MOT: Ready.
Motor ready.
Set the target angle using serial terminal:
In this case, the motor barely moves, and I’m unsure if the direction detection or pole pair estimation is accurate.
The sending of the T command does not seem coherent.
![]() My questions:
My questions:
- Can the AMT103 encoder work reliably without the index pin in SimpleFOC?
- Is the 28 pole pairs count too high for automatic pole detection? Should I skip that step
- Should I manually set the encoder direction (sensor.direction = Direction::CW/CCW)?
- Why does FOC fail with the index pin, but completes (even if poorly) without it?
- Did I not fill in the pinouts correctly?
Full code :
#include <SimpleFOC.h>
/**
*
* Position/angle motion control example
* Steps:
* 1) Configure the motor and encoder
* 2) Run the code
* 3) Set the target angle (in radians) from serial terminal
*
*
* NOTE :
* > Arduino UNO example code for running velocity motion control using an encoder with index significantly
* > Since Arduino UNO doesn't have enough interrupt pins we have to use software interrupt library PciManager.
*
* > If running this code with Nucleo or Bluepill or any other board which has more than 2 interrupt pins
* > you can supply doIndex directly to the encoder.enableInterrupts(doA,doB,doIndex) and avoid using PciManger
*
* > If you don't want to use index pin initialize the encoder class without index pin number:
* > For example:
* > - Encoder encoder = Encoder(2, 3, 8192);
* > and initialize interrupts like this:
* > - encoder.enableInterrupts(doA,doB)
*
* Check the docs.simplefoc.com for more info about the possible encoder configuration.
*
*/
#include <SimpleFOC.h>
// BLDC motor & driver instance
//BLDCMotor motor = BLDCMotor(11);
BLDCMotor motor = BLDCMotor(28);
//BLDCDriver3PWM driver = BLDCDriver3PWM(9, 5, 6, 8);
BLDCDriver3PWM driver = BLDCDriver3PWM(6, 10, 5,8);
// Stepper motor & driver instance
//StepperMotor motor = StepperMotor(50);
//StepperDriver4PWM driver = StepperDriver4PWM(9, 5, 10, 6, 8);
// encoder instance
//Encoder encoder = Encoder(2, 3, 8192);
//Encoder sensor = Encoder(2, 3, 2048);
Encoder sensor = Encoder(3, 2, 2048,4);
// Interrupt routine intialisation
// channel A and B callbacks
void doA(){sensor.handleA();}
void doB(){sensor.handleB();}
// angle set point variable
float target_angle = 0;
// instantiate the commander
Commander command = Commander(Serial);
void doTarget(char* cmd) { command.scalar(&target_angle, cmd); }
void setup() {
// use monitoring with serial
Serial.begin(115200);
// enable more verbose output for debugging
// comment out if not needed
SimpleFOCDebug::enable(&Serial);
// initialize encoder sensor hardware
sensor.init();
sensor.enableInterrupts(doA, doB);
// link the motor to the sensor
motor.linkSensor(&sensor);
// driver config
// power supply voltage [V]
driver.voltage_power_supply = 12;
driver.init();
// link the motor and the driver
motor.linkDriver(&driver);
// aligning voltage [V]
motor.voltage_sensor_align = 3;
// set motion control loop to be used
motor.controller = MotionControlType::angle;
// contoller configuration
// default parameters in defaults.h
// velocity PI controller parameters
motor.PID_velocity.P = 0.2f;
motor.PID_velocity.I = 20;
motor.PID_velocity.D = 0;
// default voltage_power_supply
motor.voltage_limit = 6;
// jerk control using voltage voltage ramp
// default value is 300 volts per sec ~ 0.3V per millisecond
motor.PID_velocity.output_ramp = 1000;
// velocity low pass filtering time constant
motor.LPF_velocity.Tf = 0.01f;
// angle P controller
motor.P_angle.P = 20;
// maximal velocity of the position control
motor.velocity_limit = 4;
// comment out if not needed
motor.useMonitoring(Serial);
// initialize motor
motor.init();
// align encoder and start FOC
motor.initFOC();
// add target command T
command.add('T', doTarget, "target angle");
Serial.println(F("Motor ready."));
Serial.println(F("Set the target angle using serial terminal:"));
_delay(1000);
}
void loop() {
// main FOC algorithm function
// the faster you run this function the better
// Arduino UNO loop ~1kHz
// Bluepill loop ~10kHz
motor.loopFOC();
// Motion control function
// velocity, position or voltage (defined in motor.controller)
// this function can be run at much lower frequency than loopFOC() function
// You can also use motor.move() and set the motor.target in the code
motor.move(target_angle);
// function intended to be used with serial plotter to monitor motor variables
// significantly slowing the execution down!!!!
// motor.monitor();
// user communication
command.run();
}
Sorry for the late reply. I'm happy that you found your issue!
– Antun_Skuric