Hello guys,
I’ve promised to myself to solve this issue…but no way! I really need your help. Here below my configuration:
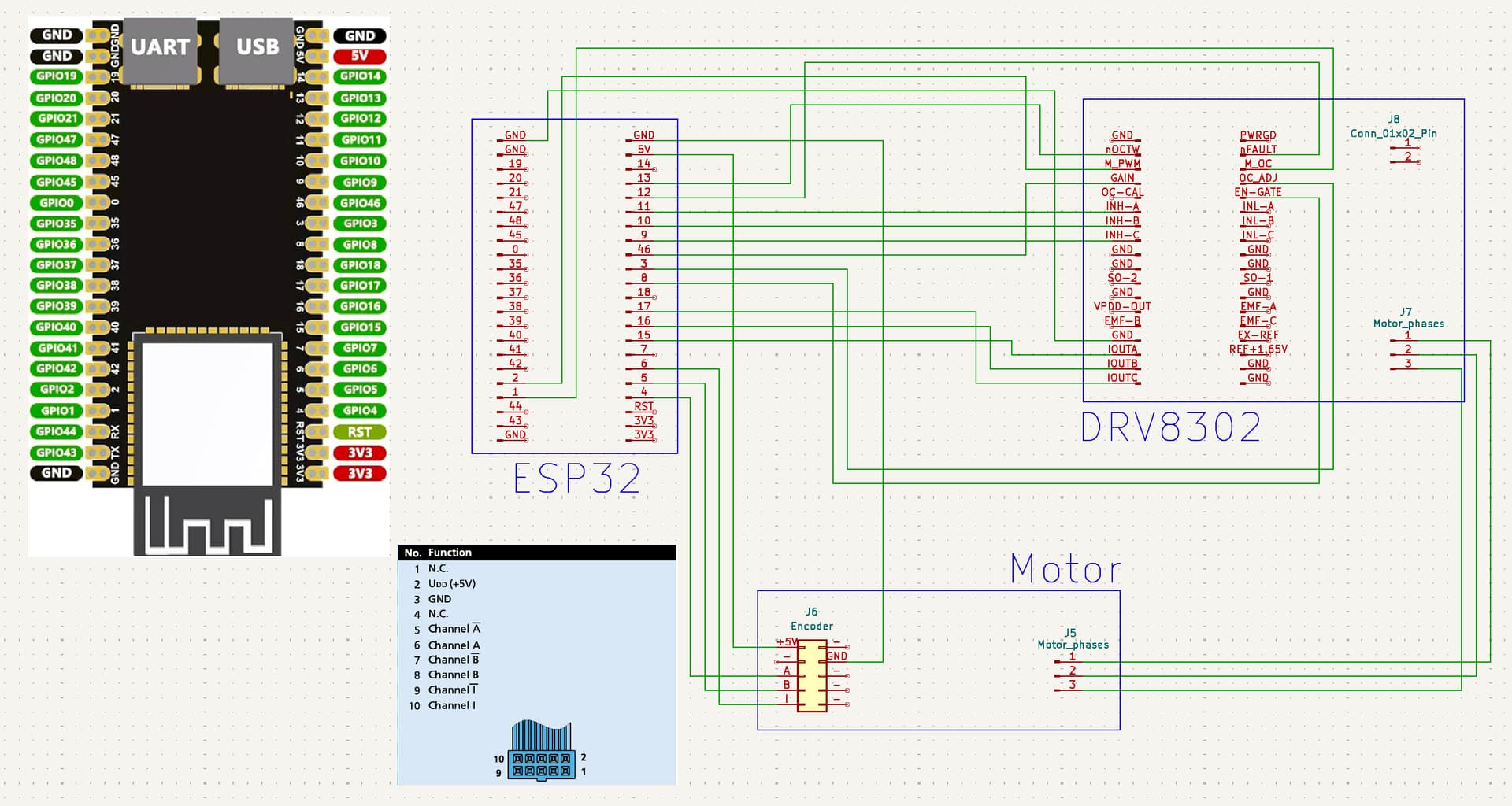
- ESP32S3
- DRV8302 driver
- Motor with phase resistance 2Ohm
- Encoder: 500ppr
Here the schematics:
Here below the code:
#include <Arduino.h>
// SE ABILITI SimpleFOC deve abilitarlo anche nel platformio.ini!!!!!!
#include <SimpleFOC.h>
// DRV8302 pins connections
#define INH_A 11
#define INH_B 10
#define INH_C 9
#define EN_GATE 8
#define M_PWM 2
#define M_OC 1
#define OC_ADJ 3
#define IOUTA 15
#define IOUTB 16
#define IOUTC 17
// motor instance
BLDCMotor motor = BLDCMotor(1);
// driver instance
BLDCDriver3PWM driver = BLDCDriver3PWM(INH_A, INH_B, INH_C, EN_GATE);
// DRV8302 board has 0.005Ohm shunt resistors and the gain of 12.22 V/V
LowsideCurrentSense cs = LowsideCurrentSense(0.005f, 12.22f, IOUTA, IOUTB, IOUTC);
// encoder instance
Encoder encoder = Encoder(4, 5, 500);
// channel A and B callbacks
void doA(){encoder.handleA();}
void doB(){encoder.handleB();}
// instantiate the commander
Commander command = Commander(Serial);
void doTarget(char* cmd) { command.scalar(&motor.target, cmd); }
void doMotor(char* cmd) { command.motor(&motor, cmd); }
void setup() {
// DRV8302 specific code
// M_OC - enable over-current protection
pinMode(M_OC,OUTPUT);
digitalWrite(M_OC,LOW);
// M_PWM - enable 3pwm mode
pinMode(M_PWM,OUTPUT);
digitalWrite(M_PWM,HIGH);
// OD_ADJ - set the maximum over-current limit possible
// Better option would be to use voltage divisor to set exact value
pinMode(OC_ADJ,OUTPUT);
digitalWrite(OC_ADJ,HIGH);
// initialize encoder sensor hardware
encoder.init();
encoder.enableInterrupts(doA, doB);
// link the motor to the sensor
motor.linkSensor(&encoder);
// driver config
// power supply voltage [V]
driver.voltage_power_supply = 24;
driver.init();
// link driver
motor.linkDriver(&driver);
// link current sense and the driver
cs.linkDriver(&driver);
// limiting motor movements
motor.phase_resistance = 2.0; // [Ohm]
motor.current_limit = 0.3; // [Amps] - if phase resistance defined
//motor.voltage_limit = 1; // [V] - if phase resistance not defined
motor.velocity_limit = 5; // [rad/s] cca 50rpm
// aligning voltage
motor.voltage_sensor_align = 1;
// set motion control loop to be used
//motor.torque_controller = TorqueControlType::voltage;
motor.controller = MotionControlType::velocity;
// controller configuration based on the control type
// velocity PID controller parameters
// default P=0.5 I = 10 D = 0
motor.PID_velocity.P = 0.025;
motor.PID_velocity.I = 0.2;
motor.PID_velocity.D = 0.0;
// jerk control using voltage voltage ramp
// default value is 300 volts per sec ~ 0.3V per millisecond
motor.PID_velocity.output_ramp = 1000;
// velocity low pass filtering
// default 5ms - try different values to see what is the best.
// the lower the less filtered
motor.LPF_velocity.Tf = 0.01;
// use monitoring with serial
Serial.begin(115200);
// comment out if not needed
motor.useMonitoring(Serial);
// initialize motor
motor.init();
// initialize current sense
cs.init();
motor.linkCurrentSense(&cs);
// driver 8302 has inverted gains on all channels
cs.gain_a *= -1;
cs.gain_b *= -1;
cs.gain_c *= -1;
cs.skip_align = true;
// align sensor and start FOC
motor.initFOC();
// set the initial motor target
// motor.target = 0.2; // Amps - if phase resistance defined
motor.target = 1; // Volts
// add target command T
// command.add('T', doTarget, "target current"); // - if phase resistance defined
command.add('T', doTarget, "target velocity");
command.add('M',doMotor, "motor");
Serial.println(F("Motor ready."));
Serial.println(F("Set the target using serial terminal:"));
_delay(1000);
}
void loop() {
// main FOC algorithm function
motor.loopFOC();
// Motion control function
motor.move();
motor.monitor();
// user communication
command.run();
}
If I do not use the current sense, everything works perfectly (PID parameters tuned accordingly).
The problem arises when the cs.init() (current sense initialization) happens: the ESP32S3 is crashing with core dump, exactly if I uncomment this function. I’ve searched everywhere inside the community forum but I really have not found any solution on this…I’m struggling since 4 days now but no way…thank you!!!