The problem: My motor toggles back and forth
what I have done:
I’ve tried a wild amount of different things but the farthest I’ve gotten is:
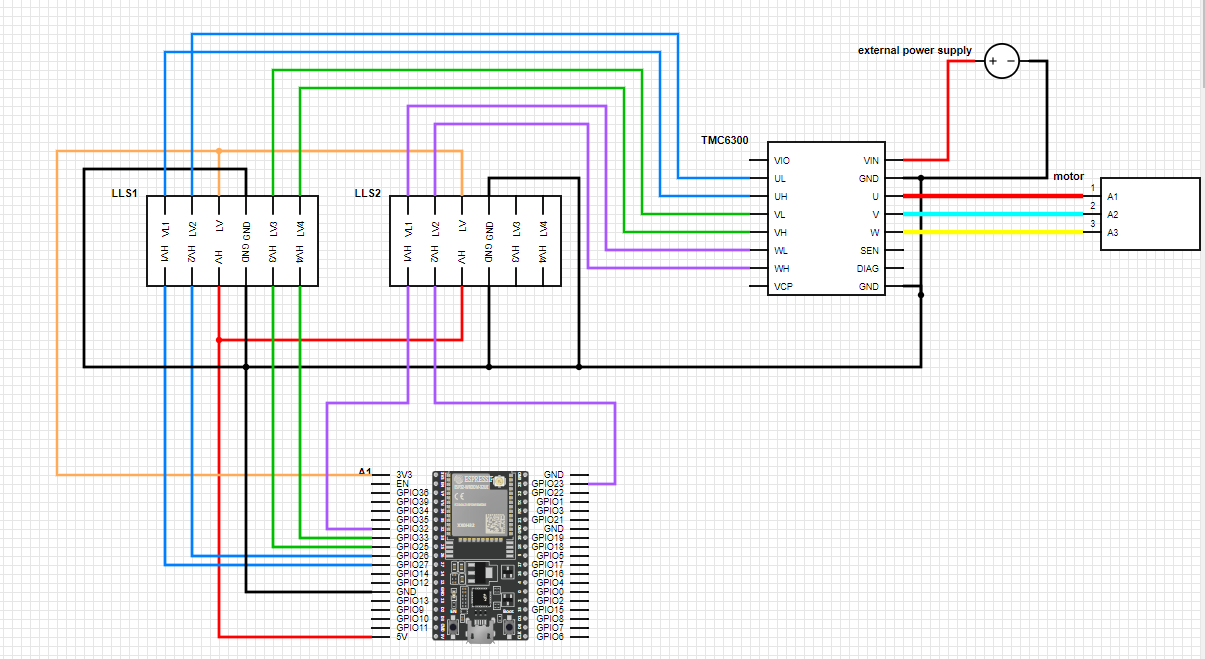
I have the three wires from the motor connected to pins U V and W on the driver.
I have the 6 pins for the H bridges connected through a logic level shifter. These are the connections to the gpio pins of the esp32:
- UL → 26
- UH → 27
- VL → 25
- VH → 33
- WL → 32
- WH → 23
I am unsure why the motor is bouncing back and forth. I’ve tried a ridiculous amount of things and I do not know how to troubleshoot this further.
If my question is lacking information that would help debug, please let me know!
the code I am running:
// Open loop motor control example
#include <SimpleFOC.h>
BLDCMotor motor = BLDCMotor(7);//, 7.8, 270);
BLDCDriver6PWM driver = BLDCDriver6PWM(32,23, 25,33, 26,27);
/*
* ESP32
* UL -> 26
* UH -> 27
* VL -> 25
* VH -> 33
* WL -> 32
* WH -> 23
*/
//target variable
float target_velocity = 6;
Commander command = Commander(Serial);
void setup() {
driver.voltage_power_supply = 5;
driver.voltage_limit = 5;
driver.pwm_frequency = 32000;
driver.init();
motor.linkDriver(&driver);
motor.voltage_limit = 3; // [V]
motor.controller = MotionControlType::velocity_openloop;
motor.init();
Serial.begin(115200);
Serial.println("Motor ready!");
Serial.println("Set target velocity [rad/s]");
_delay(1000);
}
void loop() {
motor.move(target_velocity);
command.run();
}
What microcontroller? What driver board?
Are you using Arduino or PlatformIO?
The microcontroller I am using is an esp32-wroom-32D
The driver is a TMC6300
and I am using the arduino IDE
Hi @Ziayakens,
This pin configuration looks good, so does your code.
Could you tell us a bit more about your setup, how did you do the wiring?
Do you have a common ground between the microcontroller and the board?
How are you powering the board?
I am powering the board with an external variable power supply
I forgot to add but the microcontroller is powered through the usb connection
This is my setup:
These are the logic level shifters
oh no what am I doing! I got something mixed up and now have it clarified, this is a 3v logic, let me try changing that and see if it makes a difference.
Update: It spins but it seems to snap between positions slightly, like its not quite a 100% smooth spin, is that normal?
Yes, this is “cogging”. Every motor will exhibit this a bit, but some are worse than others. With proper PID tuning, higher current, and higher speed, it is reduced.
thank you for the heads up
Hello, I’ve been testing the same setup as you for several days without using the leveling adapters, and I can’t get my motor to move. However, if I create a program with:
driver.setPwm(5, 0, 0); _delay(tempo); // Step 1
driver.setPwm(5, 5, 0); _delay(tempo); // Step 2
driver.setPwm(0, 5, 0); _delay(tempo); // Step 3
driver.setPwm(0, 5, 5); _delay(tempo); // Step 4
driver.setPwm(0, 0, 5); _delay(tempo); // Step 5
driver.setPwm(5, 0, 5); _delay(tempo); // Step 6
, it works, but I would like to use motor.move. The ESP is powered by USB, and the motor by an external 5V 10A power supply. Can you help me?