Haptic Control - Telepresence Demo
")
Haptic Control - Telepresence Demo
Hey guys!
I’m doing a small Alpha run of the board soon. Please fill this google forms if you’re interested so I can have an idea on how many boards I should have ready:
Cheers ![]()
UPDATE on current sensing:
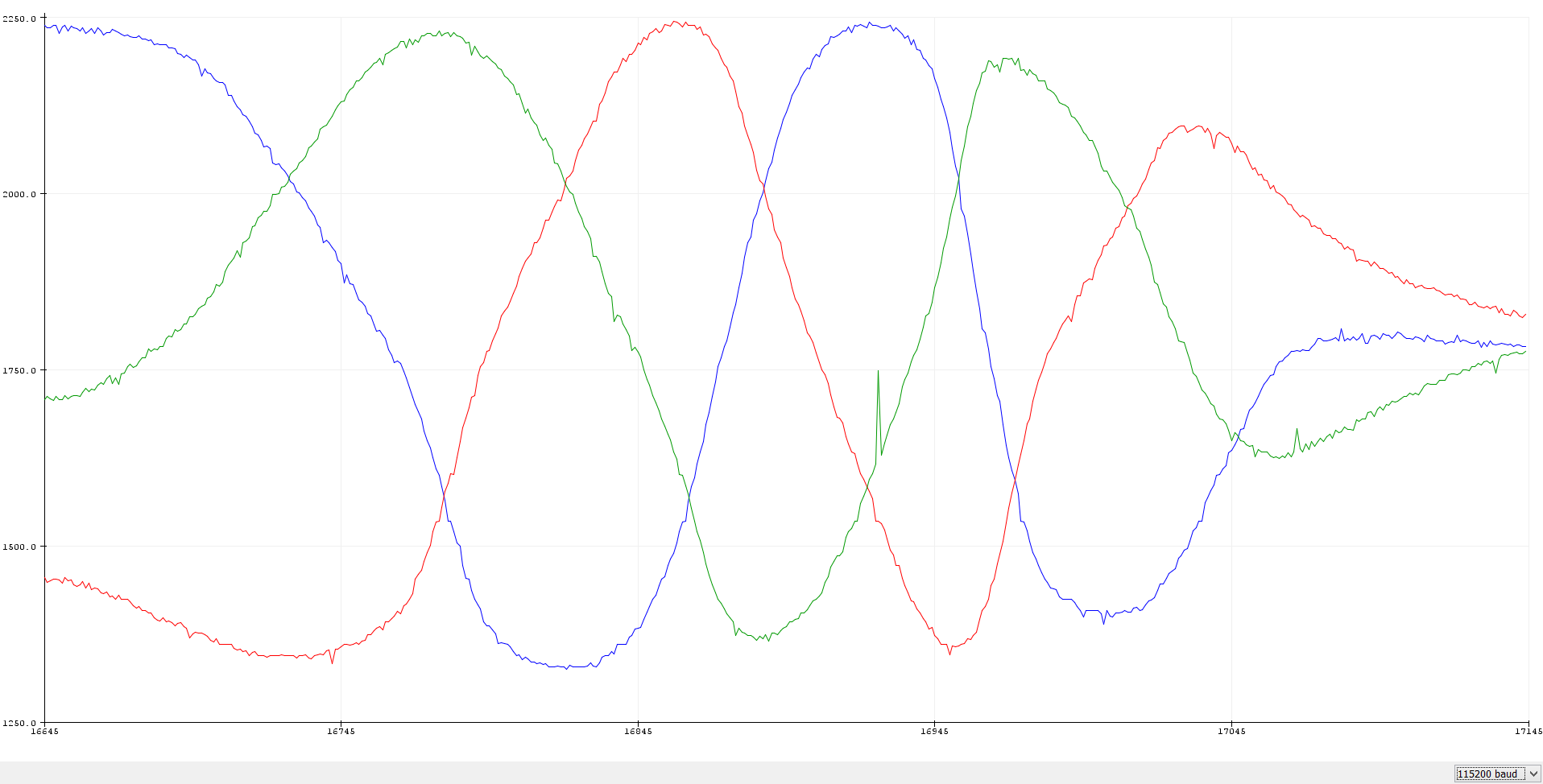
As it has been discussed on the forum before, the Dagor Controller uses a low-side shunt resistor for current sensing, this posed a challenge to sync the ADC measurement with the on-time of the low-side FET of each phase. With the ESP32’s MCPWM unit I managed to do this and get good current readings.
Good current readings:
Bad (not synced) current readings:

Exciting! When are you going to order?
24vx60A = 1.4KW might need some fans on that ![]()
I’ll order them this Sunday ![]()
That would be an absolute maximum rating with incredible heat-sinking and cooling and no more than a few millis or less!!!
I would be up for one. Off to fill out that form shortly
Awesome work !
I am very interested to see how you’ll handle the phases current reading. Do you intend to use a current control loop with park transformation ?
I would like to control a much bigger motor (up to 84V / more than 100A phase), but it’s a very good work already. I intend to use shunts, direct 6 PWM control and hall sensors to achieve a torque control board. It’s for an electric scooter. But I’ll post more about it ![]()
by the way, the ESP32 has very poor ADC (bad linearity and dead zones). I hope it will be enought to use in the control loop.
Hey @Francois_DESLANDES,
I haven’t decide how I will approach the current sensing just yet. I haven’t had time to experiment. I’ll post when I do ![]() .
.
You’re correct with the ESP32’s ADC. This might or might not be an issue, it all depends on what I need/ want; even if the reading are not linear it might not be a big issue. I would have to do real tests and see if it affects the desired response or not.
ADC readings are slow, one solution we found for this is to take one current reading per PWM interrupt trigger. So if my PWM frequency is 20kHz, the current readings for each phase are at a 6.666kHz rate.
for linearity, yes, and there is few tricks to calibrate it.
for speed, i’ll check if it can be improved.
and for current reading, i hope you’re good with mathematics ![]() (i am not … lol)
(i am not … lol)
2 posts were merged into an existing topic: ESP32 + Xiaomi M365 controller + moteur with hall sensors
You might want to look at DRV8353 drivers for that. 100V tolerance and it has a version with integrated current sense amps. It’s good for servo applications and might work well for you as well.
I’ve been working hard for the Alpha release of the board ![]()
We’ll have the sale up and running this month!
@David_Gonzalez There is another design similar to this one linked below. What are the differences between both designs?
Thanks.
Hey @happytm,
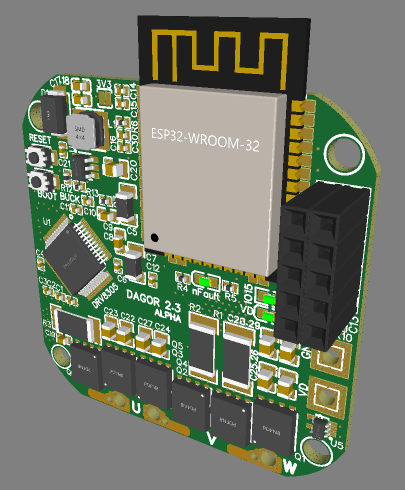
What you linked is my friend’s @Gouldpa board. Our boards are very similar, but with a few key differences. Paul’s board uses CAN, has an onboard USB connector, has the magnetic encoder on the same side as the rest of the components and is bigger.
For my board I tried to make everything as small as possible and compact as possible, you can talk to the board only with ESP-NOW and UART, it has bigger sense resistors, and it was specifically designed to run with SimpleFOC. ![]()
@David_Gonzalez Thank you for your quick reply. ESP-NOW, SimpleFOC support and encoder on the bottom is definitely useful improvements.
Thanks.
I wouldn’t say improvements. They’re just different with different purposes and applications ![]()
Understood.
I will be looking for the progress you make.
Good luck.
Thanks.
Is it possible to hook it up on SPI? If youd want to use an external ethercat controller that talks SPI, for example.
The board is a master SPI for talking to the DRV8305 and magnetic encoder.
You could potentially have a slave device that answers with an instruction when asked.