Hi! I have been trying getting closed loop to work with my custom DRV8841 + ESP32-s3 board for a nema17 stepper.
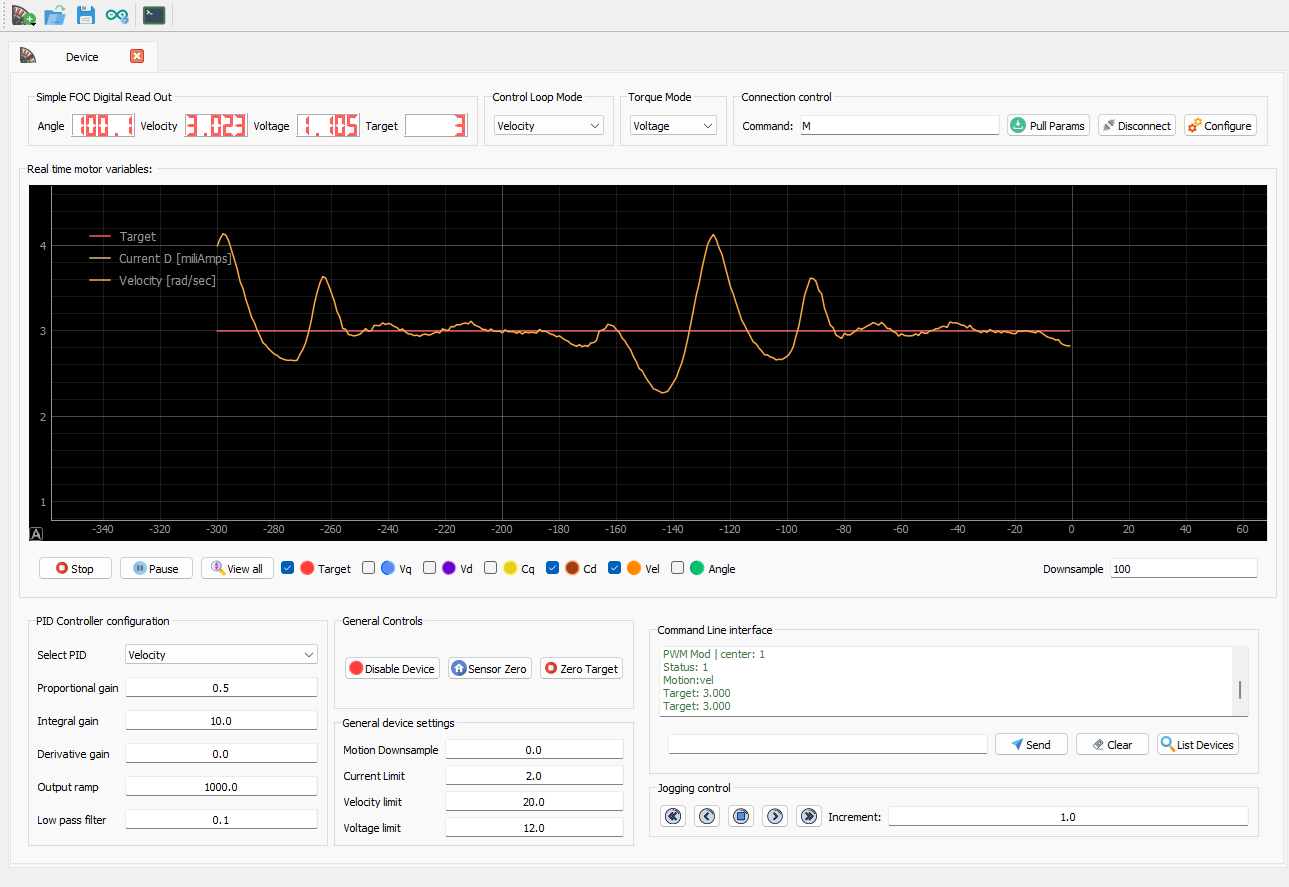
This is the velocity behaviour in closed loop.
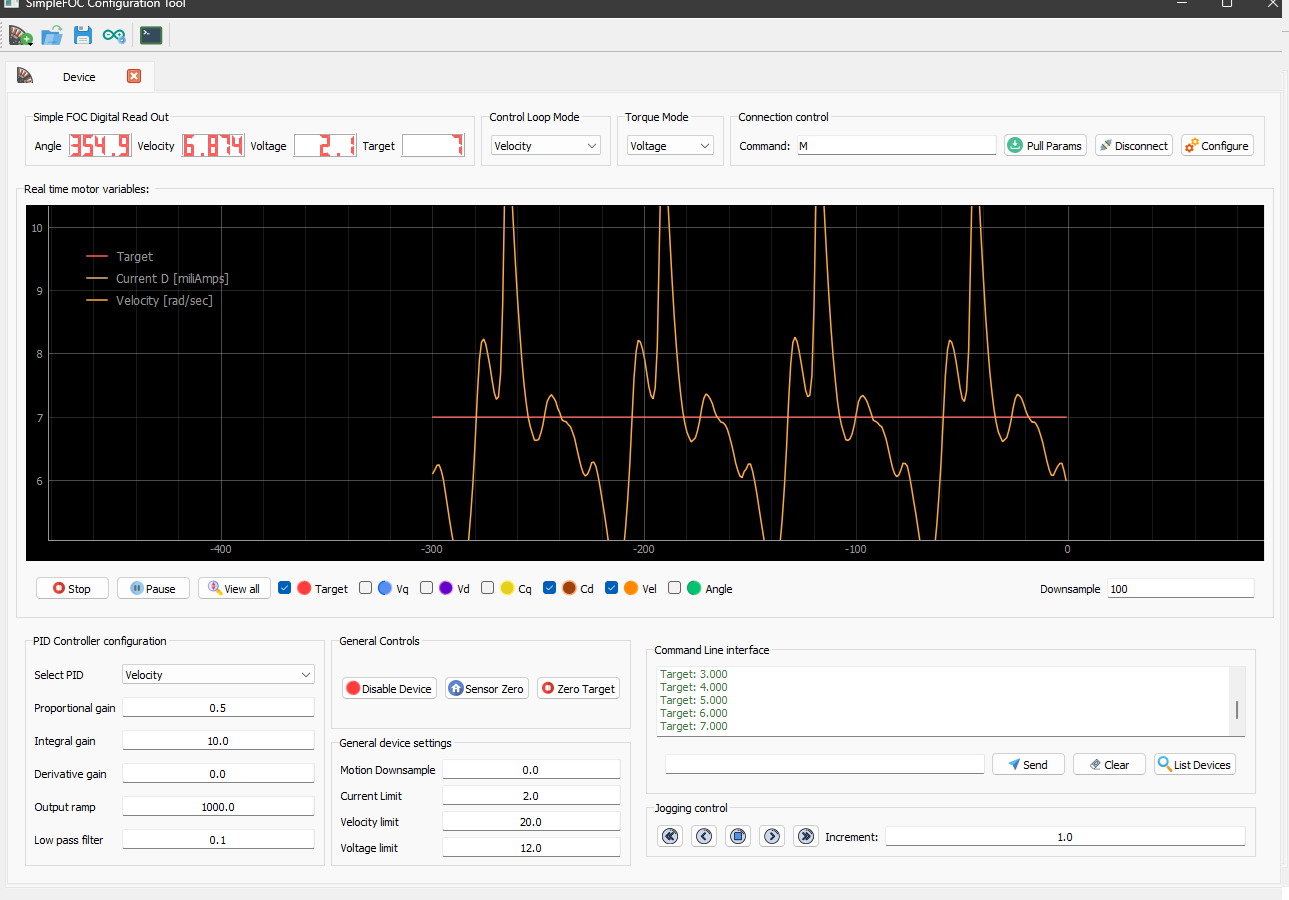
This is with a higher target velocity.
Here is what the stepper looks like during.

Behaviour in torque closed loop

Higher target torque
Debuging the AS5048a with the drivers library I get the following information

Does this seem like a reasonable amount of noise? This is during no movement and while the driver is not activated.
I have tried increasing the velocity LPF without much improvement.
Setting sensor.min_elapsed_time = 0.001; did not improve the closed loop behaviour, but did drastically reduce the noise in the velocity readings from the magnetic sensor.

This is using 1ms as min_elapsed_time

This is 0.1ms as min_elapsed_time
The magnet should be good, from supermagnete.de. There is also has a plastic space between the magnet and the metal shaft. The distance between the magnet and the sensor is very low, about 1mm, this gave a decent AGC-value of ~50. Increasing the distance does not improve the performance.
PP check and all the diagnostics seem good.
Any clue as to what could be causing these issues? Thanks ![]()