Hi,
I am trying to position control 8 N20 DC motors with encoders using SimpleDCMotor library using STM32F722ZE.
I am using Generic sensor implementation to calculate angle. The position control works for positive angles only. i.e :
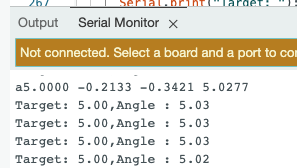
- If I ask the motor to go to 5rad with commander input as a5 it works.
- Then inputing a2 also works, moving the motor back
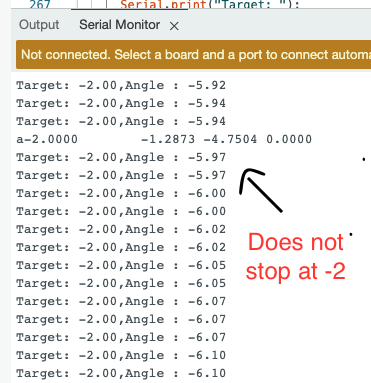
- If I then input a-2, then motor keeps rotating forever once it goes below 0rad.
You can see the serial monitor screenshots below. Upon noticing, what I see is, both encoder value, angle value are correct but the actual position reading(4th value) from Monitor does not go below 0rad. If i manually rotate the motor as well, the angle reading is fine but monitor reading is not.
-
Moving to a5 (5 rad, motor1) stops at 5 rad
-
Moving to a2, stops at 2.
-
Moving to a-2 , does not stop at all
I remember, this code worked when I tested in Esp32 few months back (not sure of library versions).
Current Library versions installed are latest:
SimpleFoc: 2.3.4
SimpleDCMotor:1.0.3
SimpleFOCDrivers: 1.0.8
I am not good at coding embedded systems, please see if any mistakes in my Code below:
#include <Arduino.h>
#include "SimpleFOC.h"
#include "SimpleFOCDrivers.h"
#include "SimpleDCMotor.h"
#include <vector>
#include <sstream>
#include <iterator>
using namespace std;
const int numMotors = 1;
const int numMotorsToMove = 1;
struct MotorInfo {
int encoderPinE1;
int encoderPinE2;
int driverPin1;
int driverPin2;
DCDriver2PWM driver;
volatile int lastEncoded;
volatile long encoderValue;
volatile float angle;
DCMotor motor;
GenericSensor sensor;
MotorInfo()
: encoderPinE1(0), encoderPinE2(0), driverPin1(0), driverPin2(0), driver(DCDriver2PWM(0, 0)), lastEncoded(0), encoderValue(0), angle(0.0f), motor(), sensor([](){ return 0.0f; }) {}
};
MotorInfo motors[numMotors];
Commander commander = Commander(Serial);
#define DEFINE_SENSOR_CALLBACK(idx) \
float readSensor##idx() { return motors[idx].angle; }
#define DEFINE_COMMANDER_CALLBACK(idx) \
void onMotor##idx(char* cmd) { commander.motor(&motors[idx].motor, cmd); }
#define DEFINE_UPDATE_ENCODER_CALLBACK(idx) \
void updateEncoder##idx() { updateEncoder(idx); }
DEFINE_SENSOR_CALLBACK(0)
DEFINE_SENSOR_CALLBACK(1)
DEFINE_SENSOR_CALLBACK(2)
DEFINE_SENSOR_CALLBACK(3)
DEFINE_SENSOR_CALLBACK(4)
DEFINE_SENSOR_CALLBACK(5)
DEFINE_SENSOR_CALLBACK(6)
DEFINE_SENSOR_CALLBACK(7)
DEFINE_COMMANDER_CALLBACK(0)
DEFINE_COMMANDER_CALLBACK(1)
DEFINE_COMMANDER_CALLBACK(2)
DEFINE_COMMANDER_CALLBACK(3)
DEFINE_COMMANDER_CALLBACK(4)
DEFINE_COMMANDER_CALLBACK(5)
DEFINE_COMMANDER_CALLBACK(6)
DEFINE_COMMANDER_CALLBACK(7)
DEFINE_UPDATE_ENCODER_CALLBACK(0)
DEFINE_UPDATE_ENCODER_CALLBACK(1)
DEFINE_UPDATE_ENCODER_CALLBACK(2)
DEFINE_UPDATE_ENCODER_CALLBACK(3)
DEFINE_UPDATE_ENCODER_CALLBACK(4)
DEFINE_UPDATE_ENCODER_CALLBACK(5)
DEFINE_UPDATE_ENCODER_CALLBACK(6)
DEFINE_UPDATE_ENCODER_CALLBACK(7)
typedef float (*FnPtr)();
const FnPtr sensorCallBackArrays[]{
readSensor0,readSensor1,readSensor2,readSensor3,
readSensor4,readSensor5,readSensor6,readSensor7
};
typedef void (*CommanderFnPtr)(char* cmd);
const CommanderFnPtr commanderFunctionArrays[]{
onMotor0, onMotor1, onMotor2, onMotor3,
onMotor4, onMotor5, onMotor6, onMotor7
};
typedef void (*InterruptFnPtr)();
const InterruptFnPtr interruptFunctionArrays[]{
updateEncoder0, updateEncoder1,updateEncoder2,updateEncoder3,
updateEncoder4, updateEncoder5,updateEncoder6,updateEncoder7
};
// Define encoder and motor pins for each motor
const int encoderPins[][8] = {
{PC2, PC1}, // PF15, PE13
{PC0, PC3}, //
{PD4, PD5},
{PD6, PD7},
{PG8, PG9},
{PG10,PG11},
{PG12, PG13},
{PG14, PG15}
};
const int driverPins[][8] = {
{PA9,PA8}, // TIM1-CH1, TIM1-CH2
{PA11,PA10}, // TIM1-CH3, TIM1-CH4
{PA5,PB3}, // TIM2-CH1, TIM2-CH2
{PB11,PB10}, // TIM2-CH3, TIM2-CH4
{PA7,PA6}, // TIM3-CH1, TIM3-CH2
{PC8,PC9}, // TIM3-CH3, TIM3-CH4
{PD12,PD13}, // TIM4-CH1, TIM4-CH2
{PD14,PD15}, // TIM4-CH3, TIM4-CH4
// {PA0,PA1}, // TIM5-CH1, TIM5-CH2
// {PA2,PA3}, // TIM5-CH3, TIM5-CH4
// {PC6,PC7}, // TIM8-CH1, TIM8-CH2
// {PC8,PC9}, // TIM8-CH3, TIM8-CH4
// {PE5,PE6}, // TIM9-CH1, TIM9-CH2
// {PB14,PB15}, // TIM12-CH1, TIM12-CH2
};
void updateEncoder(int motorIndex) {
int MSB = digitalRead(motors[motorIndex].encoderPinE1);
int LSB = digitalRead(motors[motorIndex].encoderPinE2);
int encoded = (MSB << 1) | LSB;
int sum = (motors[motorIndex].lastEncoded << 2) | encoded;
if (sum == 0b1101 || sum == 0b0100 || sum == 0b0010 || sum == 0b1011) motors[motorIndex].encoderValue--;
if (sum == 0b1110 || sum == 0b0111 || sum == 0b0001 || sum == 0b1000) motors[motorIndex].encoderValue++;
motors[motorIndex].lastEncoded = encoded;
motors[motorIndex].angle = (motors[motorIndex].encoderValue * 6.28319) /9048.0f;
}
void initMotor(int motorIndex, float P, float I, float D) {
motors[motorIndex].driver = DCDriver2PWM(motors[motorIndex].driverPin1, motors[motorIndex].driverPin2);
motors[motorIndex].driver.voltage_power_supply = 12.0f;
motors[motorIndex].driver.voltage_limit = 12.0f;
motors[motorIndex].driver.pwm_frequency = 100;
motors[motorIndex].driver.init();
motors[motorIndex].sensor = GenericSensor(sensorCallBackArrays[motorIndex]);
motors[motorIndex].sensor.init();
motors[motorIndex].motor.linkDriver(&(motors[motorIndex].driver));
motors[motorIndex].motor.linkSensor(&(motors[motorIndex].sensor));
motors[motorIndex].motor.voltage_limit = 12.0f;
// motors[motorIndex].motor.velocity_limit = 20.0f;
// if(motorIndex!=2)
motors[motorIndex].motor.velocity_limit = 6.0f;
motors[motorIndex].motor.controller = MotionControlType::angle;
motors[motorIndex].motor.torque_controller = TorqueControlType::voltage;
motors[motorIndex].motor.init();
motors[motorIndex].motor.PID_velocity.P = P;
motors[motorIndex].motor.PID_velocity.I = I;
motors[motorIndex].motor.PID_velocity.D = D;
motors[motorIndex].motor.PID_velocity.output_ramp = 400.0f;
motors[motorIndex].motor.LPF_velocity.Tf = 0.001f;
motors[motorIndex].motor.P_angle.P = 22.5f;
motors[motorIndex].motor.enable();
motors[motorIndex].motor.sensor_direction = Direction::CW;
motors[motorIndex].motor.useMonitoring(Serial);
//motors[motorIndex].motor.monitor_downsample = 500;
motors[motorIndex].motor.monitor_start_char = 'a'+motorIndex;
}
void setup() {
while(!Serial);
Serial.begin(115200);
Serial.print("Max Timers:");
Serial.println(SIMPLEFOC_STM32_MAX_PINTIMERSUSED);
for (int i = 0; i < numMotors; i++) {
// Serial.println("motor init");
motors[i].encoderPinE1 = encoderPins[i][0];
motors[i].encoderPinE2 = encoderPins[i][1];
motors[i].driverPin1 = driverPins[i][0];
motors[i].driverPin2 = driverPins[i][1];
motors[i].lastEncoded = 0;
motors[i].encoderValue = 0;
// motors[i].angle = 0.0f;
// motors[i].motor.target=0.0f;
// Serial.println("motor set");
pinMode(motors[i].encoderPinE1, INPUT_PULLUP);
pinMode(motors[i].encoderPinE2, INPUT_PULLUP);
pinMode(motors[i].driverPin1, OUTPUT);
pinMode(motors[i].driverPin2, OUTPUT);
// Serial.println("Pinmode set");
digitalWrite(motors[i].encoderPinE1, HIGH);
digitalWrite(motors[i].encoderPinE2, HIGH);
attachInterrupt(digitalPinToInterrupt(motors[i].encoderPinE1), interruptFunctionArrays[i], CHANGE);
attachInterrupt(digitalPinToInterrupt(motors[i].encoderPinE2), interruptFunctionArrays[i], CHANGE);
float p = 1.0f;
// if(i!=0&&i!=1){
// p=4.2f;
// }
initMotor(i, p, 0.02f, 0.001f);
commander.add('a' + i, commanderFunctionArrays[i], "DC motor ");
}
Serial.println("Initialization complete.");
}
template <typename Out>
void split(const std::string &s, char delim, Out result) {
std::istringstream iss(s);
std::string item;
while (std::getline(iss, item, delim)) {
*result++ = item;
}
}
vector<string> split(const string &s, char delim) {
vector<string> elems;
split(s, delim, back_inserter(elems));
return elems;
}
void parseSerialInput(string input) {
vector<string> motorCommands = split(input, ',');
for (string command : motorCommands) {
// Serial.println(const_cast<char*>(command.c_str()));
commander.run(const_cast<char*>(command.c_str()));
}
}
void loop() {
if (Serial.available() > 0) {
string input = Serial.readStringUntil('\n').c_str();
parseSerialInput(input);
}
for (int i = 0; i < numMotorsToMove; i++) {
if(i==0){
motors[i].motor.move();
motors[i].motor.monitor();
Serial.print(motors[0].motor.target);
Serial.print(": ");
Serial.println(motors[i].angle);
}
}
}