@dekutree64
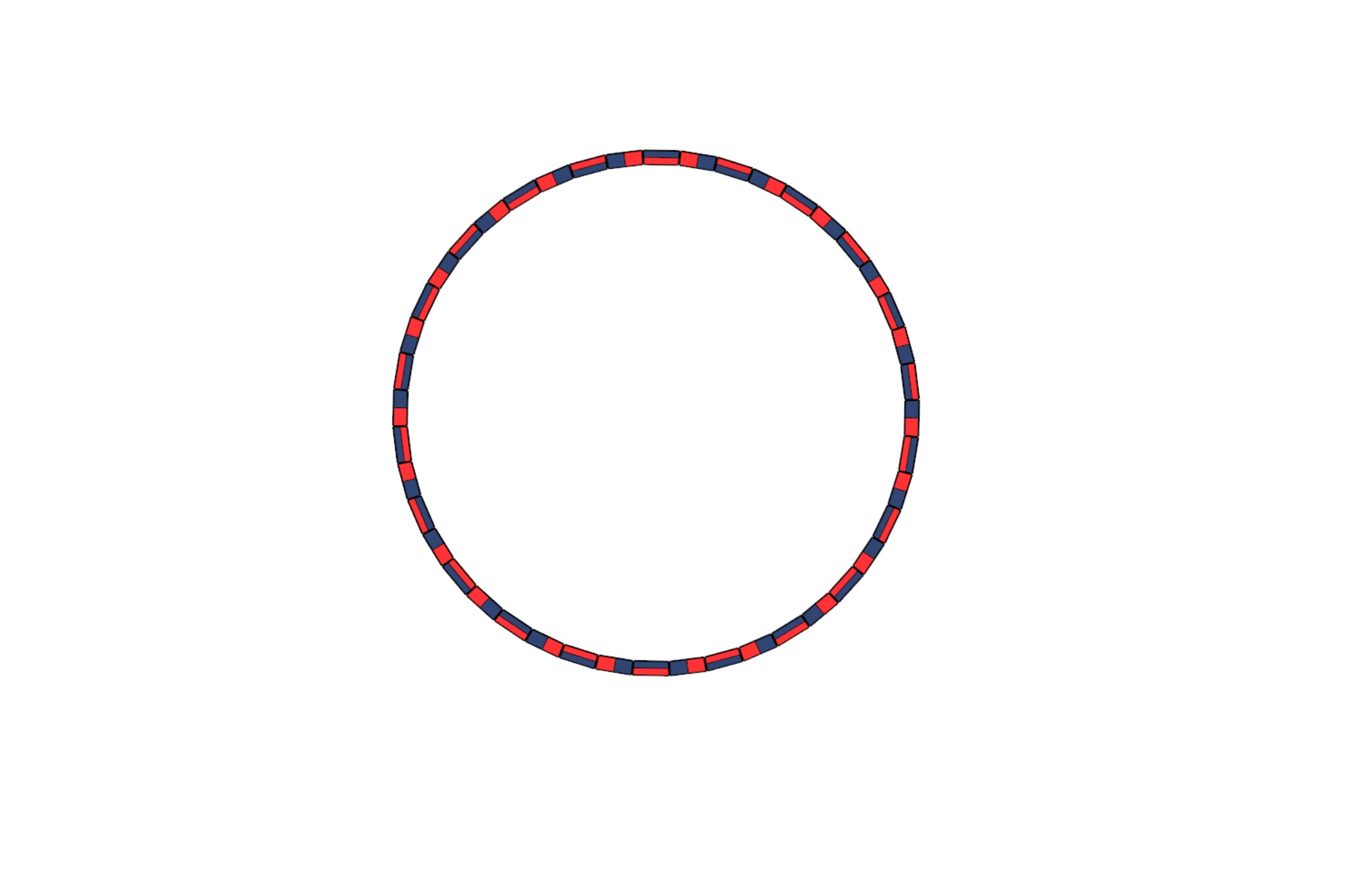
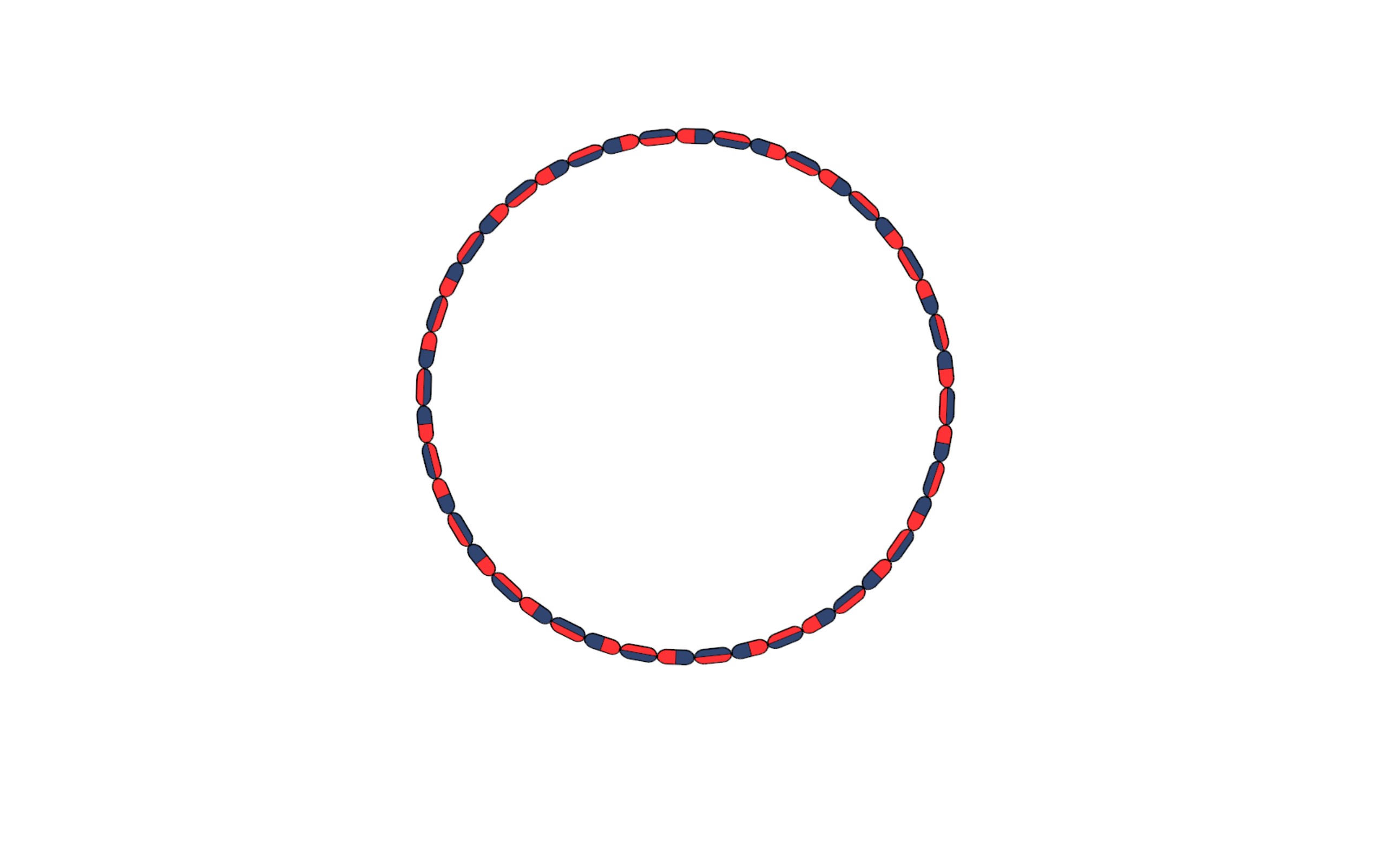
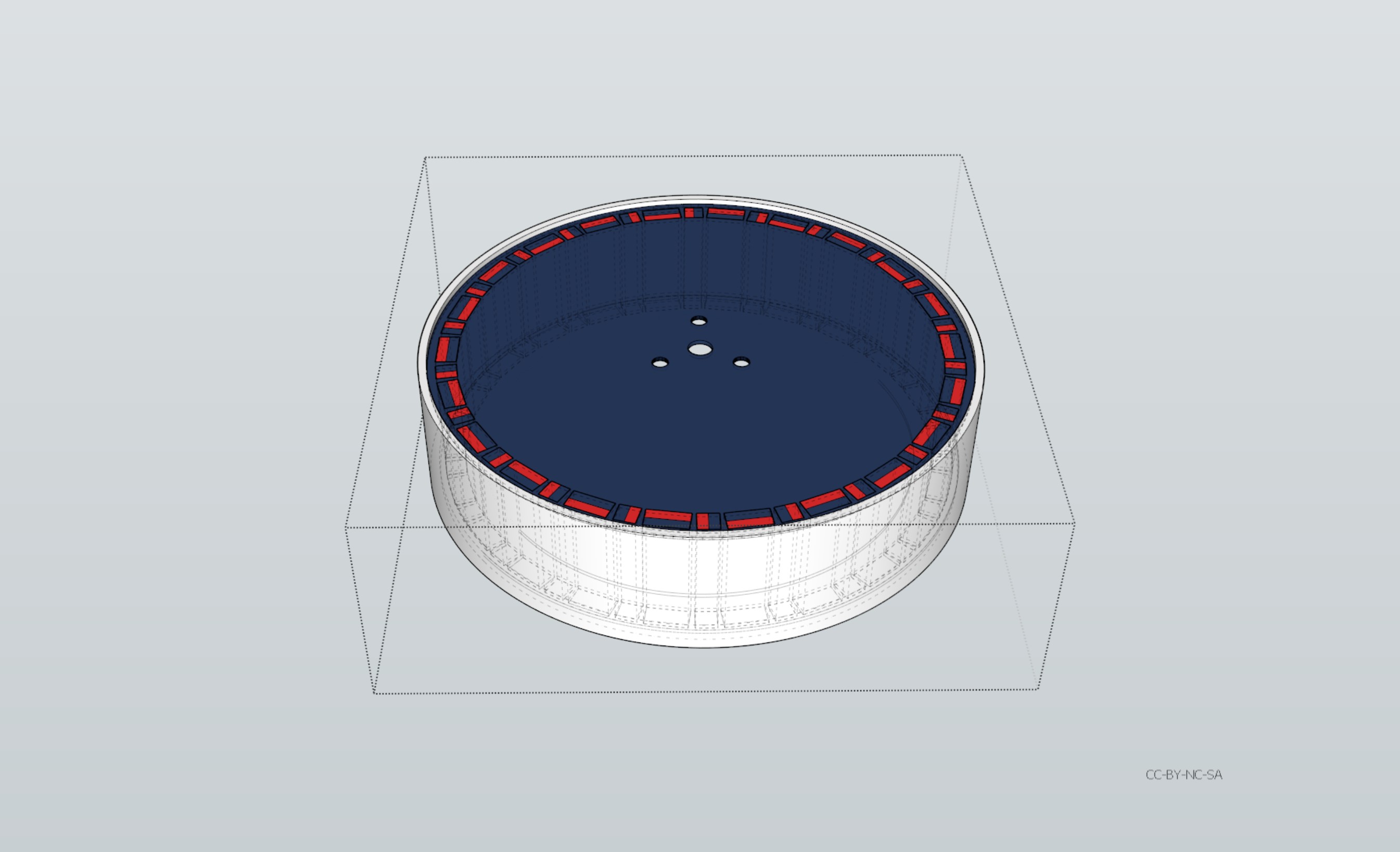
This design takes the added strength of the hallbach array using a lazer-cut stainless steel retainer. Ideally it could be stamped like the stator is produced. With a typical MC/ATV stator with a 115mm OD. (18 stator teeth) the magnets (30mm x 10mm x 5mm and 30mm x 5mm x 5mm) can be mounted to a 135mm aluminum pipe with a 4mm thickness. The retainer for the magnets should be backed with some more mass, so maybe carbon fiber plate or another stainless steel layer, bonded with the retainer. It should fit in a 2mm lib in the aluminum pipe,
You only get 0.85mm between the magnets.
With a custom 3D printed Nylon bearing holder/mount, it could have a high temperature rating. If injected molded, then 300C is possible.
Edit: I guess the retainer, not on the rotor lid side, could “just” be a Nylon ring bonded with some semi strong silicone.
I intend to go up to 1500 rpm, so definitely less centrifugal forces compared to a fast motor.
There is very little info on the MC stators for sale. The vendors apparently does not feel any need to write the phase resistance. There is one video on youtube where a pro measures different makes of MC stators. One had 0.5 ohm resistance another had 0.13 ohm.
Chamfering the magnets gives a 0.22mm increase between magnets. Remember, stainless steel is 3X stronger then regular steel. having 1.06mm should give a significant reinforcement. It does entail making custom magnets. The upside to the uniform shape of the magnets is that we “only” need two shapes, to create the array.
But then again, if you wanted to ensure the grade of the magnets to be 45SH (150C temperature rated). you probably need to make them custom anyways. The magnets should be battle-hardened with inside epoxy.
First the larger 10mm wide magnets should be glued in using a 3d printed holder/spacer. Secondly the smaller 5mm x 5mm will slide right in, since the magnetic forces will equal out the pull. Maybe you can actually make all the magnets align into position simply by gluing them into the retainer / rotor, if held in place. This could be achieved by first applying the glue to the retainer, and then have a 3d printed spacer for the magnets to hover like 5mm above the glue. But then again, you probably want a epoxy bond on the backside of the magnets, so they would need glue right then and there,
The ideal scenario would be to extend the length of the magnets and the thickness of the stator. But then again, there is also the sintered powder coated iron stators. They would allow a ideal scenario, where the bearings could be pressed directly into the stator.
The use case scenario for this 40ish KV motor is for a eMTB geared direct drive with a 3 to 1 gear ratio. So 3 turns on the motor is one turn on the bike wheel. In this case 27.5+ inch.










")





