Hello everyone,
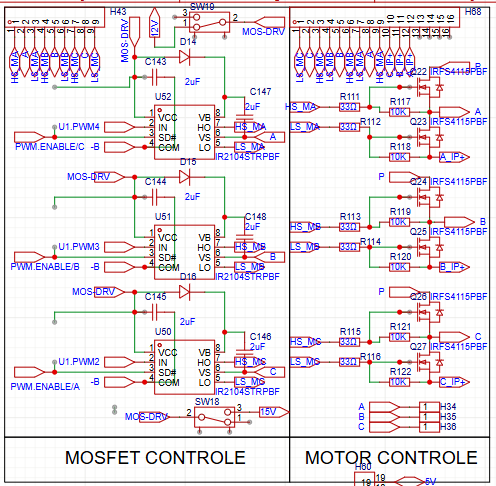
I am new to SimpleFOC, and I’m struggling to get a smooth rotation with a commercial drone BLDC motor. I am using a custom board. Here are the main MOSFETs + MOSFET controllers schematic:
The Problem:
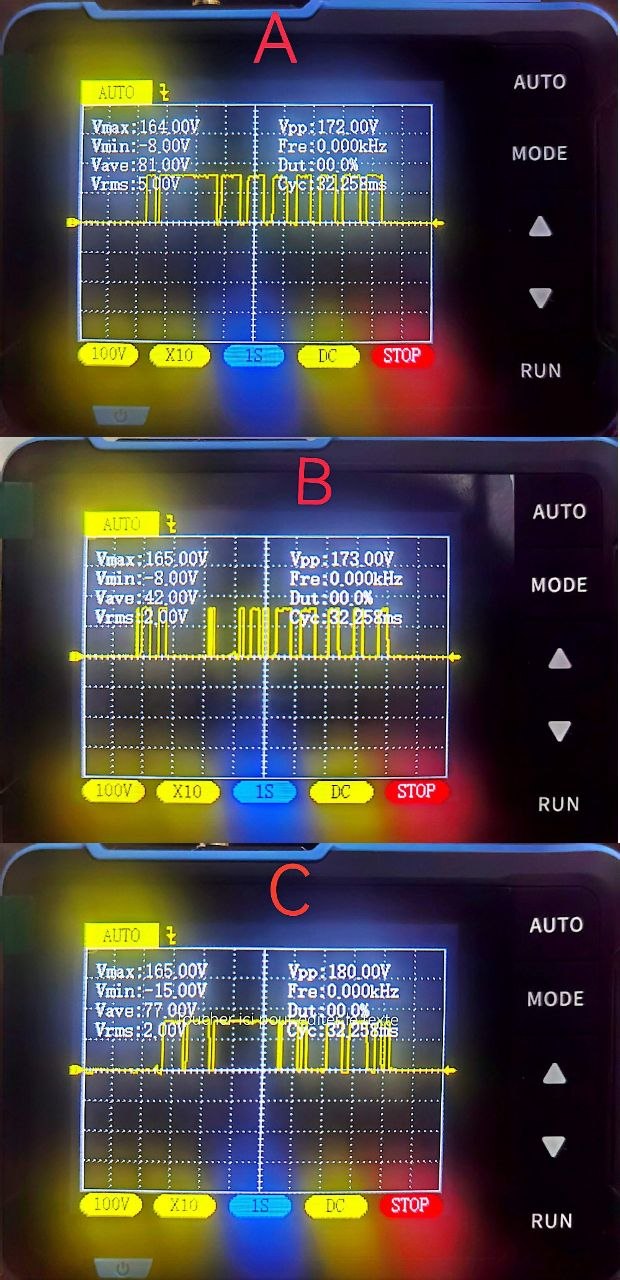
The motor is not spinning as expected. It vibrates violently (like a jackhammer) even at low-speed commands (like 1 rad/s). I’ve tried setting a very low voltage limit (around 1V), but the motor remains stationary. Increasing the voltage limit only increases the vibration. I need to achieve smooth open loop or basic rotation to make sure the base hardware works correctly before implementing the current sensing and the AS5600.
Testing steps:
First, I decided to use a normal commercial 1000KV A2212 Brushless DC Motor BLDC for the first test. Now, when I put T at (1-10) and increase L to (3-5), the motor starts moving/jerking back and forth. I also noticed that if I put my finger on the capacitors across the VCC/GND of the IR2104, the motor starts turning more than it jerks, but it still jerks nonetheless. And when I increase the L to 6, the power supply signals a short and stops supplying power.
Here is the code I am using:
#include <SimpleFOC.h>
BLDCMotor motor = BLDCMotor(7);
BLDCDriver6PWM driver = BLDCDriver6PWM(15, 2, 4, 16, 17, 5);
Commander command = Commander(Serial);
void doTarget(char* cmd) { command.scalar(&motor.target, cmd); }
void doLimit(char* cmd) { command.scalar(&motor.voltage_limit, cmd); }
void setup() {
Serial.begin(115200);
SimpleFOCDebug::enable(&Serial);
driver.pwm_frequency = 20000;
driver.voltage_power_supply = 15.5;
driver.voltage_limit = 12.0;
driver.dead_zone = 0.06f;
if (!driver.init()) {
Serial.println("Driver init failed!");
return;
}
motor.linkDriver(&driver);
motor.controller = MotionControlType::velocity_openloop;
motor.voltage_limit = 0.5;
if (!motor.init()) {
Serial.println("Motor init failed!");
return;
}
motor.target = 5.0;
command.add('T', doTarget, "target velocity [rad/s]");
command.add('L', doLimit, "voltage limit [V]");
Serial.println("✅ A2212 safe open-loop test ready");
Serial.println("1. Set power supply current limit to 4-5A");
Serial.println("2. Send L 0.5 then slowly increase");
Serial.println("3. Max recommended for now: L 8");
}
void loop() {
motor.loopFOC();
motor.move();
command.run();
}
I got it off of this post that was having a similar issue, but only on bigger motors:
https://community.simplefoc.com/t/vibrating-problem-with-48v-23a-bldc-motor/8047
Here is a link to a YouTube video showcasing the problem in question:
Hardware & Configuration:
-
Motor: A2212 1000KV BLDC motor
-
Pole Pairs: 7
-
Power Supply: 15.5V
-
Sensors: no sensors for the moment (Hall/current sensors and magnetic encoder in the future).
-
Library: SimpleFOC v2.4
Any guidance on how to get this motor spinning smoothly would be greatly appreciated. Thanks!"