Hi, I tried to test the current sense in my custom PCB.
- STM32G431
- AS5600
- MN4006 380KV
- DRV8305
- Shunts 2m ohm
And when I start the code I have this issue:
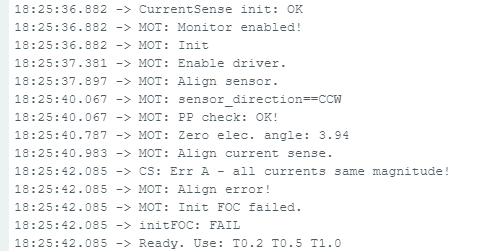
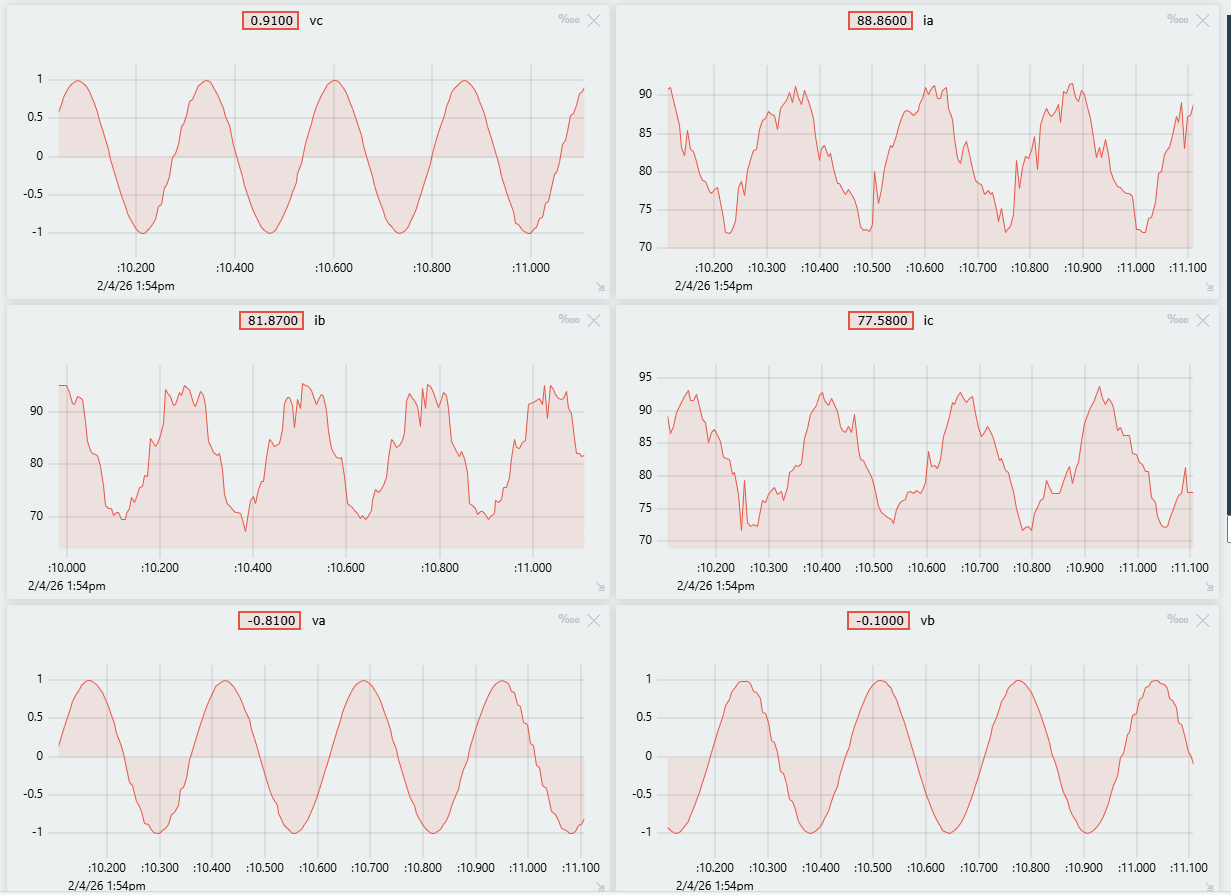
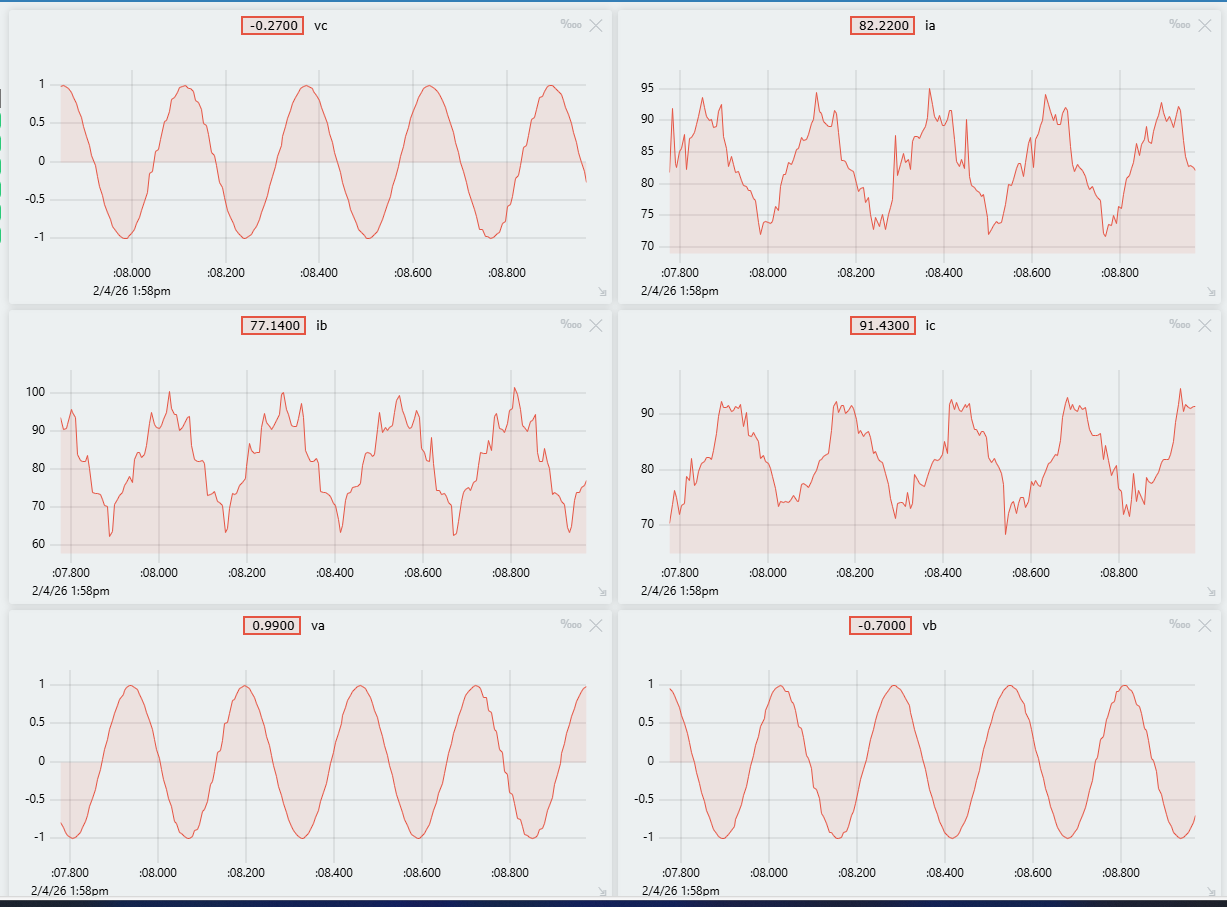
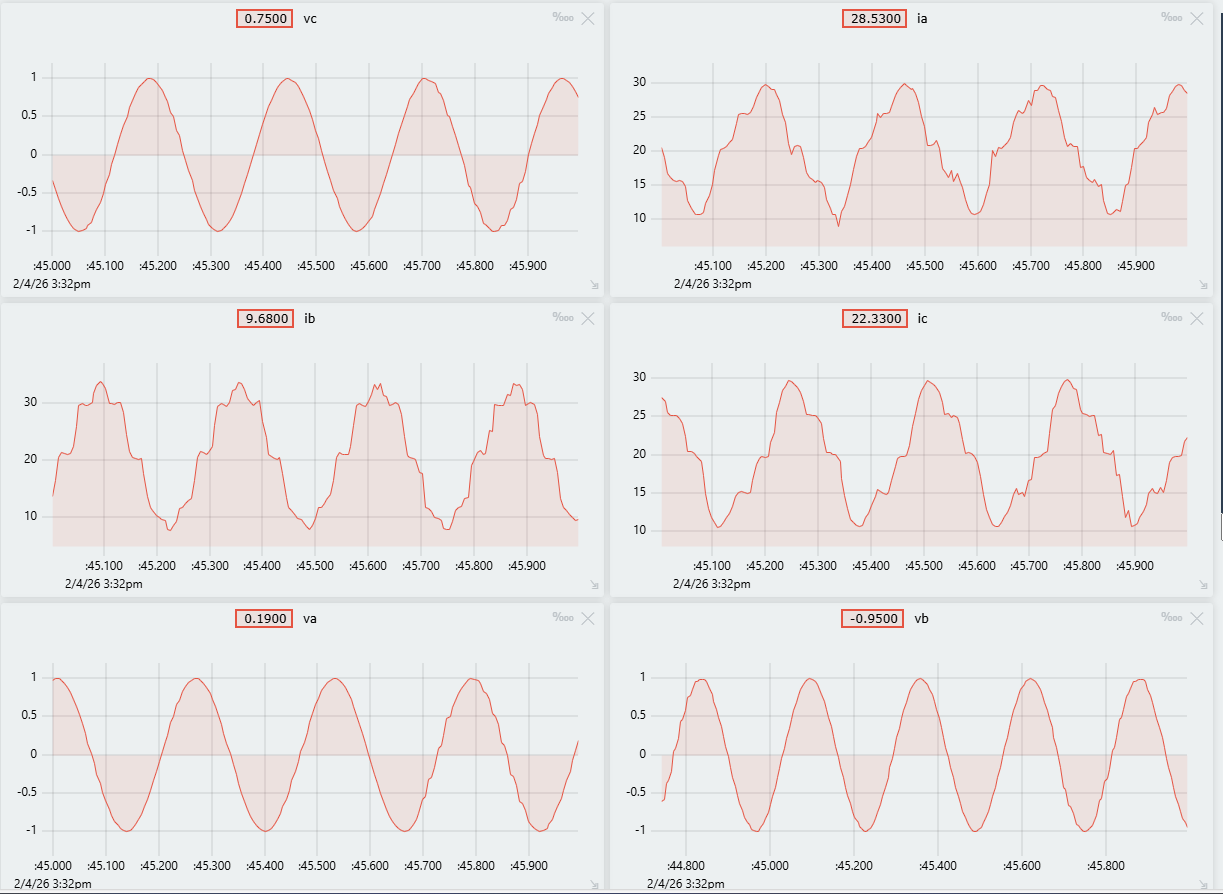
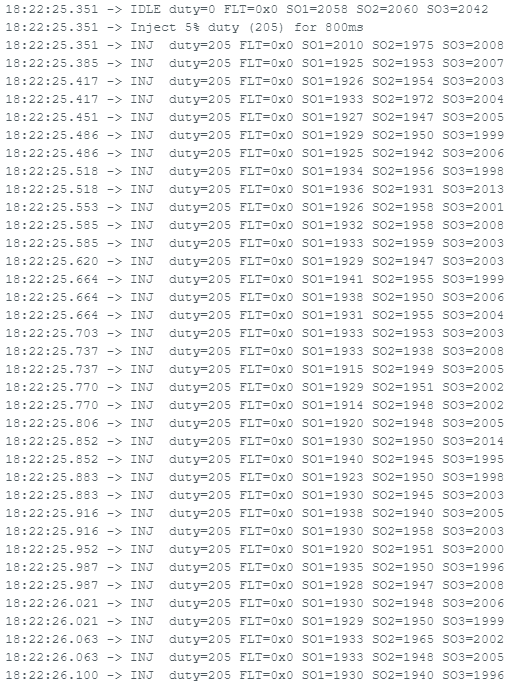
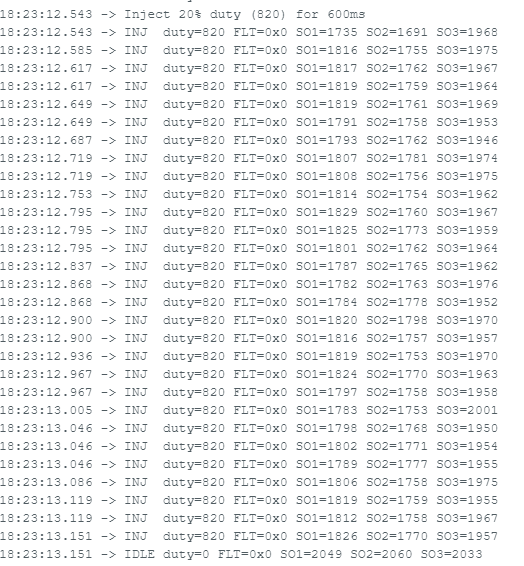
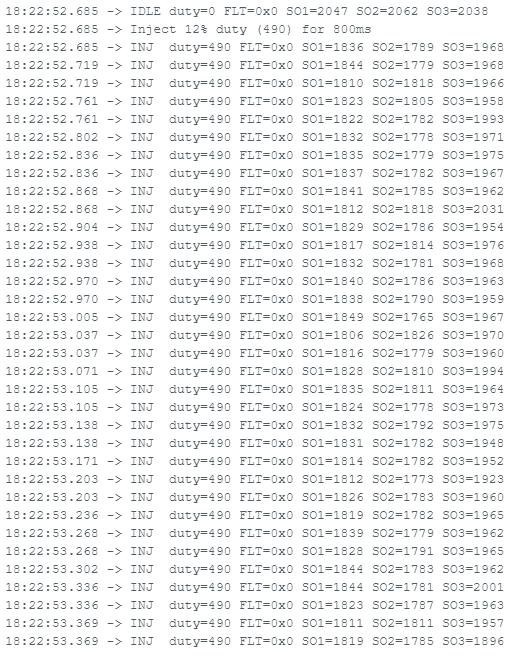
I test a different code only to see the ADC of SO1, SO2, and SO3 applying some PWM in the phases and I have:
So I don’t know why the current sense doesn’t init.
These are my codes:
Current control:
#include <SimpleFOC.h>
#include <Wire.h>
#include <SPI.h>
#define CS_DRV PA4
#define EN_DRV PC9
// PWM
#define PWM_U PA8
#define PWM_V PA9
#define PWM_W PA10
// Shunts (según tu esquema)
#define SO1_PIN PC4
#define SO2_PIN PC5
#define SO3_PIN PB2
HardwareSerial Serial2(PA3, PA2);
// Commander: corriente objetivo (A, escala depende de CS_GAIN real)
float target_current = 0.0f;
Commander command = Commander(Serial2);
void doTarget(char* cmd) { command.scalar(&target_current, cmd); }
// Encoder
MagneticSensorI2C sensor = MagneticSensorI2C(AS5600_I2C);
// Motor/Driver
BLDCMotor motor = BLDCMotor(12);
BLDCDriver3PWM driver = BLDCDriver3PWM(PWM_U, PWM_V, PWM_W, EN_DRV);
// Shunt=2mΩ; CSA gain real desconocida (default).
// Si CSA=20V/V => 25. Si 40 => 12.5. Si 10 => 50.
static const float CS_GAIN_EST = 25.0f;
//
LowsideCurrentSense current_sense = LowsideCurrentSense(CS_GAIN_EST, SO1_PIN, SO2_PIN, SO3_PIN);
// DRV8305 SPI
void drvWrite(uint8_t reg, uint16_t data) {
uint16_t packet = ((reg & 0x7F) << 11) | (data & 0x7FF);
digitalWrite(CS_DRV, LOW);
SPI.transfer16(packet);
digitalWrite(CS_DRV, HIGH);
}
uint16_t drvRead(uint8_t reg) {
uint16_t packet = (0x8000 | ((reg & 0x7F) << 11));
digitalWrite(CS_DRV, LOW);
uint16_t response = SPI.transfer16(packet);
digitalWrite(CS_DRV, HIGH);
return response;
}
// Rampa de corriente para evitar picos
static float iq_cmd = 0.0f;
static uint32_t last_us = 0;
void setup() {
Serial2.begin(115200);
delay(20);
Serial2.println("\n== SimpleFOC DRV8305 + AS5600 (FOC CURRENT, 3-shunt) ==");
// I2C AS5600
Wire.setSDA(PC11);
Wire.setSCL(PC8);
Wire.begin();
Wire.setClock(100000);
sensor.init();
SimpleFOCDebug::enable(&Serial2);
// SPI DRV8305
pinMode(CS_DRV, OUTPUT);
digitalWrite(CS_DRV, HIGH);
SPI.begin();
SPI.beginTransaction(SPISettings(1000000, MSBFIRST, SPI_MODE1));
delay(10);
// Tus writes (por ahora igual)
drvWrite(0x03, 0x003);
delay(5);
drvWrite(0x07, 0x2FF);
delay(5);
Serial2.print("DRV FLT=0x"); Serial2.println(drvRead(0x0F), HEX);
// Driver
driver.voltage_power_supply = 12.0f;
driver.voltage_limit = 6.0f;
driver.init();
// Link
motor.linkDriver(&driver);
motor.linkSensor(&sensor);
// Current sense
current_sense.linkDriver(&driver);
bool cs_ok = current_sense.init();
motor.linkCurrentSense(¤t_sense);
Serial2.print("CurrentSense init: "); Serial2.println(cs_ok ? "OK" : "FAIL");
// FOC config
motor.foc_modulation = FOCModulationType::SpaceVectorPWM;
motor.voltage_limit = 6.0f;
motor.voltage_sensor_align = 3.0f;
motor.controller = MotionControlType::torque;
motor.torque_controller = TorqueControlType::foc_current;
// Límites conservadores (sube después)
motor.current_limit = 1.0f;
motor.velocity_limit = 200.0f;
// PID corriente (estables)
motor.PID_current_q.P = 1.2f;
motor.PID_current_q.I = 80.0f;
motor.PID_current_d.P = 1.2f;
motor.PID_current_d.I = 80.0f;
motor.LPF_current_q.Tf = 0.004f;
motor.LPF_current_d.Tf = 0.004f;
motor.useMonitoring(Serial2);
// Init
motor.init();
int ok = motor.initFOC();
Serial2.print("initFOC: "); Serial2.println(ok ? "OK" : "FAIL");
command.add('T', doTarget, "target current [A]");
Serial2.println("Ready. Use: T0.2 T0.5 T1.0");
last_us = micros();
}
void loop() {
motor.loopFOC();
// Slew
uint32_t now = micros();
float dt = (now - last_us) * 1e-6f;
last_us = now;
const float IQ_SLEW = 2.0f; // A/s
float diff = target_current - iq_cmd;
float step = IQ_SLEW * dt;
if (diff > step) diff = step;
if (diff < -step) diff = -step;
iq_cmd += diff;
// Clamp
if (iq_cmd > motor.current_limit) iq_cmd = motor.current_limit;
if (iq_cmd < -motor.current_limit) iq_cmd = -motor.current_limit;
motor.move(iq_cmd);
command.run();
// (opcional) monitoreo fault
static uint32_t tmr = 0;
if (millis() - tmr > 200) {
tmr = millis();
uint16_t flt = drvRead(0x0F);
if (flt != 0) {
Serial2.print("DRV FAULT FLT=0x"); Serial2.println(flt, HEX);
motor.disable();
}
}
}
And the test of SO1, 2 and 3:
#include <Arduino.h>
#include <SPI.h>
// ===== Ajusta a tu hardware =====
#define CS_DRV PA4
#define EN_DRV PC9
#define PWM_U PA8
#define PWM_V PA9
#define PWM_W PA10
#define SO1_PIN PC4
#define SO2_PIN PC5
#define SO3_PIN PB2
HardwareSerial Serial2(PA3, PA2);
//
static inline void drvWrite(uint8_t reg, uint16_t data) {
uint16_t packet = ((reg & 0x7F) << 11) | (data & 0x7FF);
digitalWrite(CS_DRV, LOW);
SPI.transfer16(packet);
digitalWrite(CS_DRV, HIGH);
}
static inline uint16_t drvRead(uint8_t reg) {
uint16_t packet = (0x8000 | ((reg & 0x7F) << 11));
digitalWrite(CS_DRV, LOW);
uint16_t response = SPI.transfer16(packet);
digitalWrite(CS_DRV, HIGH);
return response;
}
// ===== ADC avg =====
static int adcAvg(int pin, int n=32) {
long s = 0;
for (int i=0;i<n;i++) s += analogRead(pin);
return (int)(s / n);
}
// ===== PWM =====
static void pwmSetup() {
pinMode(EN_DRV, OUTPUT);
digitalWrite(EN_DRV, HIGH);
pinMode(PWM_U, OUTPUT);
pinMode(PWM_V, OUTPUT);
pinMode(PWM_W, OUTPUT);
analogWriteResolution(12); // 0..4095
}
static void pwmAllOff() {
analogWrite(PWM_U, 0);
analogWrite(PWM_V, 0);
analogWrite(PWM_W, 0);
}
static void pwmSetU(uint16_t duty) {
analogWrite(PWM_U, duty);
analogWrite(PWM_V, 0);
analogWrite(PWM_W, 0);
}
// ===== Inyección NO-bloqueante =====
static bool injecting = false;
static uint16_t inj_duty = 0;
static uint32_t inj_end_ms = 0;
static void startInject(uint16_t duty, uint32_t ms) {
injecting = true;
inj_duty = duty;
inj_end_ms = millis() + ms;
pwmSetU(inj_duty);
}
static void serviceInject() {
if (injecting) {
if ((int32_t)(millis() - inj_end_ms) >= 0) {
injecting = false;
pwmAllOff();
} else {
// mantener PWM activo
pwmSetU(inj_duty);
}
}
}
void setup() {
Serial2.begin(115200);
delay(50);
Serial2.println("\n== DRV8305 CSA TEST (non-blocking) ==");
analogReadResolution(12);
// SPI
pinMode(CS_DRV, OUTPUT);
digitalWrite(CS_DRV, HIGH);
SPI.begin();
SPI.beginTransaction(SPISettings(1000000, MSBFIRST, SPI_MODE1));
delay(10);
// Opcional: tus writes básicos
drvWrite(0x03, 0x003);
delay(5);
drvWrite(0x07, 0x2FF);
delay(5);
// PWM
pwmSetup();
pwmAllOff();
Serial2.print("FLT=0x"); Serial2.println(drvRead(0x0F), HEX);
Serial2.println("Comandos por Serial2:");
Serial2.println(" 1) Inject 5% (205) por 800ms");
Serial2.println(" 2) Inject 12% (490) por 800ms");
Serial2.println(" 3) Inject 20% (820) por 600ms");
Serial2.println(" 0) PWM OFF");
}
void loop() {
serviceInject();
// imprimir cada 20ms SIEMPRE (aun durante pulso)
static uint32_t t = 0;
if (millis() - t > 20) {
t = millis();
uint16_t flt = drvRead(0x0F);
int so1 = adcAvg(SO1_PIN, 16);
int so2 = adcAvg(SO2_PIN, 16);
int so3 = adcAvg(SO3_PIN, 16);
Serial2.print(injecting ? "INJ " : "IDLE");
Serial2.print(" duty="); Serial2.print(injecting ? inj_duty : 0);
Serial2.print(" FLT=0x"); Serial2.print(flt, HEX);
Serial2.print(" SO1="); Serial2.print(so1);
Serial2.print(" SO2="); Serial2.print(so2);
Serial2.print(" SO3="); Serial2.println(so3);
}
// comandos
if (Serial2.available()) {
char c = Serial2.read();
if (c == '0') {
injecting = false;
pwmAllOff();
Serial2.println("PWM OFF");
} else if (c == '1') {
Serial2.println("Inject 5% duty (205) for 800ms");
startInject(205, 800);
} else if (c == '2') {
Serial2.println("Inject 12% duty (490) for 800ms");
startInject(490, 800);
} else if (c == '3') {
Serial2.println("Inject 20% duty (820) for 600ms");
startInject(820, 600);
}
}
}