Hello everyone,
I recently started getting into SimpleFOC and i tried to replicate the PowerShield V2 on a breadboard with some BTN8962.
I have used this to wire the BTNs to the Arduino.
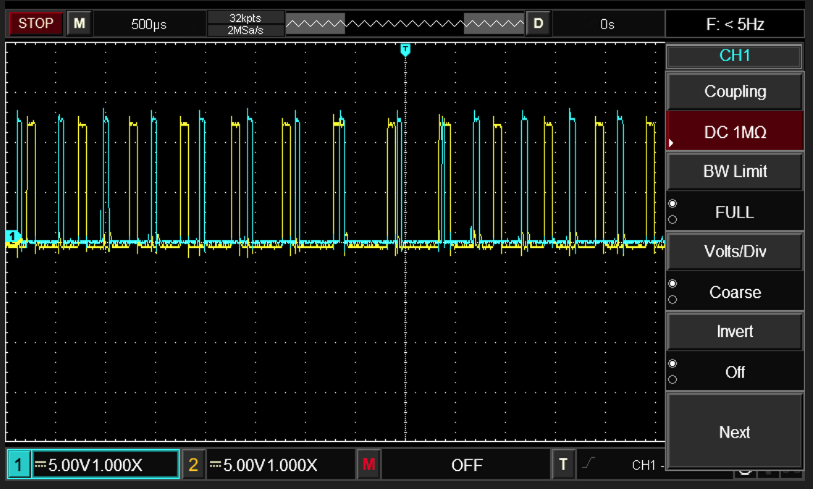
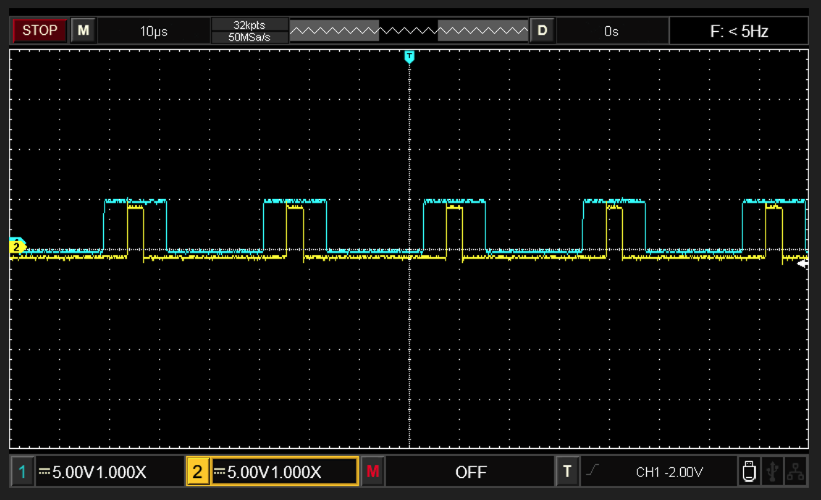
Here is the output of the BTNs that use that PWM:
The problem is that when I try to connect the motor to the setup it makes a buzzing sound and it moves a bit and stops.
The code that I used is for the open loop velocity control:
// Open loop motor control example
#include <SimpleFOC.h>
// BLDC motor & driver instance
// BLDCMotor motor = BLDCMotor(pole pair number);
BLDCMotor motor = BLDCMotor(6);
// BLDCDriver3PWM driver = BLDCDriver3PWM(pwmA, pwmB, pwmC, Enable(optional));
BLDCDriver3PWM driver = BLDCDriver3PWM(9, 5, 6, 8);
// Stepper motor & driver instance
//StepperMotor motor = StepperMotor(50);
//StepperDriver4PWM driver = StepperDriver4PWM(9, 5, 10, 6, 8);
//target variable
float target_velocity = 0;
// instantiate the commander
Commander command = Commander(Serial);
void doTarget(char* cmd) { command.scalar(&target_velocity, cmd); }
void doLimit(char* cmd) { command.scalar(&motor.voltage_limit, cmd); }
void setup() {
// use monitoring with serial
Serial.begin(115200);
// enable more verbose output for debugging
// comment out if not needed
SimpleFOCDebug::enable(&Serial);
// driver config
// power supply voltage [V]
driver.voltage_power_supply = 12;
// limit the maximal dc voltage the driver can set
// as a protection measure for the low-resistance motors
// this value is fixed on startup
driver.voltage_limit = 6;
if(!driver.init()){
Serial.println(“Driver init failed!”);
return;
}
// link the motor and the driver
motor.linkDriver(&driver);
// limiting motor movements
// limit the voltage to be set to the motor
// start very low for high resistance motors
// current = voltage / resistance, so try to be well under 1Amp
motor.voltage_limit = 2; // [V]
// open loop control config
motor.controller = MotionControlType::velocity_openloop;
// init motor hardware
if(!motor.init()){
Serial.println(“Motor init failed!”);
return;
}
// add target command T
command.add(‘T’, doTarget, “target velocity”);
command.add(‘L’, doLimit, “voltage limit”);
Serial.println(“Motor ready!”);
Serial.println(“Set target velocity [rad/s]”);
_delay(1000);
}
void loop() {
// open loop velocity movement
// using motor.voltage_limit and motor.velocity_limit
// to turn the motor “backwards”, just set a negative target_velocity
motor.move(target_velocity);
// user communication
command.run();
}
Do you have any idea why this might be happening?
i have 3 btn8962 with the output connected to each phase of a la8308 with 40p, it works fine in open loop, but in closed loop, with the as5600 magentic encoder it does not seem to work. The sensor works, i have tested it.
– ri99