I am using GBM4108H motor with my L6234. I uploaded open_loop_velocity_example, but the motor doesn’t turn. But i can feel some resistance. I am using arduino with pins 3, 5,6 and pin 2 for enable.
Here is the PCB:

Is this your own self build board?
Do you suspect hardware or software issue? Have you tried the other motor driver?
Pins look ok, perhaps share your code and board schematic?
Code:
// Open loop motor control example
#include <SimpleFOC.h>
// BLDC motor & driver instance
// BLDCMotor motor = BLDCMotor(pole pair number);
BLDCMotor motor = BLDCMotor(7);
// BLDCDriver3PWM driver = BLDCDriver3PWM(pwmA, pwmB, pwmC, Enable(optional));
BLDCDriver3PWM driver = BLDCDriver3PWM(3, 5, 6, 2);
// Stepper motor & driver instance
//StepperMotor motor = StepperMotor(50);
//StepperDriver4PWM driver = StepperDriver4PWM(9, 5, 10, 6, 8);
void setup() {
// driver config
// power supply voltage [V]
driver.voltage_power_supply = 12;
driver.init();
// link the motor and the driver
motor.linkDriver(&driver);
// limiting motor movements
motor.voltage_limit = 3; // [V]
motor.velocity_limit = 3; // [rad/s]
// open loop control config
motor.controller = ControlType::velocity_openloop;
// init motor hardware
motor.init();
Serial.begin(115200);
Serial.println(“Motor ready!”);
_delay(1000);
}
float target_velocity = 0; // [rad/s]
void loop() {
// open loop velocity movement
// using motor.voltage_limit and motor.velocity_limit
motor.move(target_velocity);
// receive the used commands from serial
serialReceiveUserCommand();
}
// utility function enabling serial communication with the user to set the target values
// this function can be implemented in serialEvent function as well
void serialReceiveUserCommand() {
// a string to hold incoming data
static String received_chars;
while (Serial.available()) {
// get the new byte:
char inChar = (char)Serial.read();
// add it to the string buffer:
received_chars += inChar;
// end of user input
if (inChar == ‘\n’) {
// change the motor target
target_velocity = received_chars.toFloat();
Serial.print("Target velocity ");
Serial.println(target_velocity);
// reset the command buffer
received_chars = "";
}
}
}
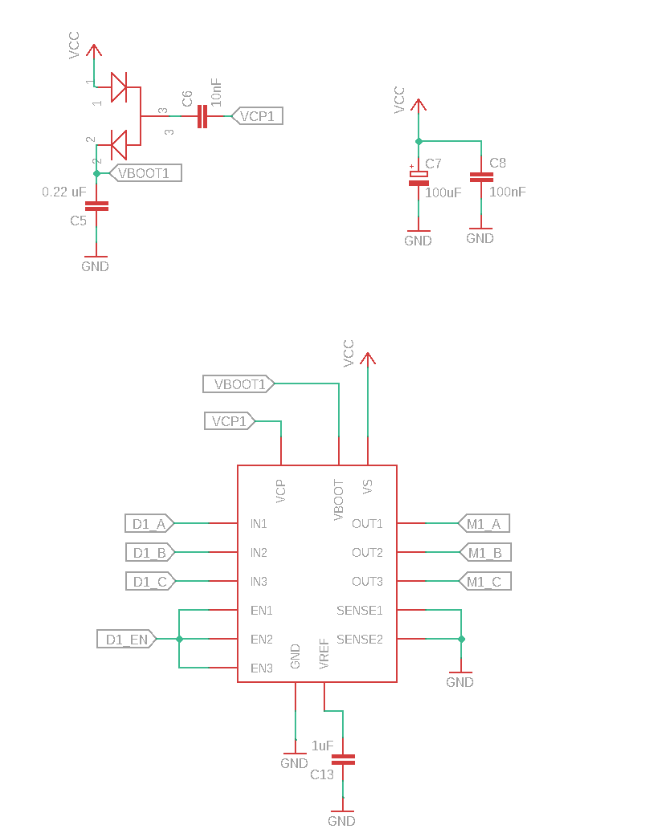
Schematic:
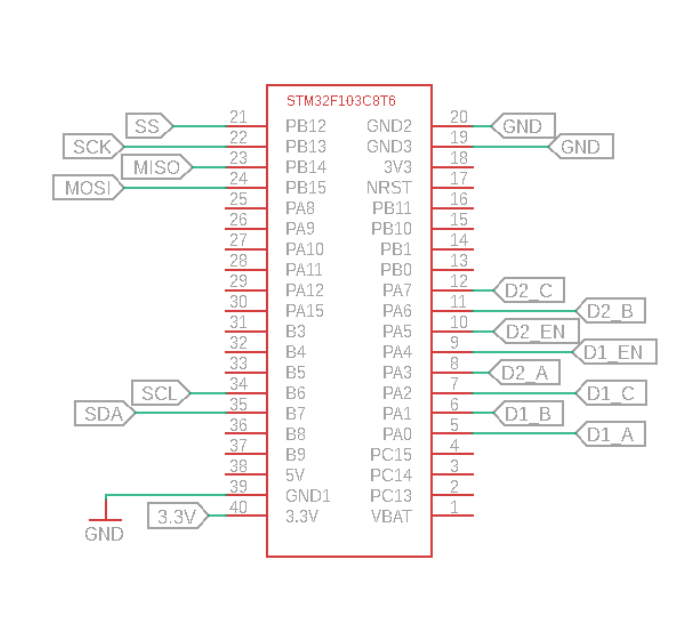
Do is D1_EN = 9 as per hardware or 2 as per software?
I suspect this is’nt the issue as you said motor was resisting.
You could try changing
float target_velocity = 1;
Perhaps you are having problems with Serial RX
1 Like
hey @Skarrob,
Have you checked that the l6234 pins are well soldered. On the image it seems like there is a lot of pins that are not connected. This might explain the issue. ![]()
1 Like
I went through such adventures with my own board - the way to troubleshoot these is as follows:
take a deadsimple blink arduino example - drive up the en pin and blink each of the phase drive pins of the bldc driver - make sure motor is disconnected and measure the voltage on each of the phase pins using multimeter - this way you will be 100pct sure there are no issues with hardware and your pin numbers are correct. Hope it helps and good luck!
2 Likes