Good Day,
I am using the B-G431B-ESC1 to power a Hub Motor with 15 Pp.
So far everything works fine. Everything works fine in open and in closed loop. Just finished PID tuning.
Now comes my question. I tried to get a analogRead of the onboard potentiometer, but no success. I thought maybe it’s a pwm-signal, so i tried to get something via the pulseIn() function, Still nothing, the output in the serial is a constant 0 for both methods. Than I thought, maybe my pin mapping is wrong, because I also tried to get an analog read of the temperature sensor.
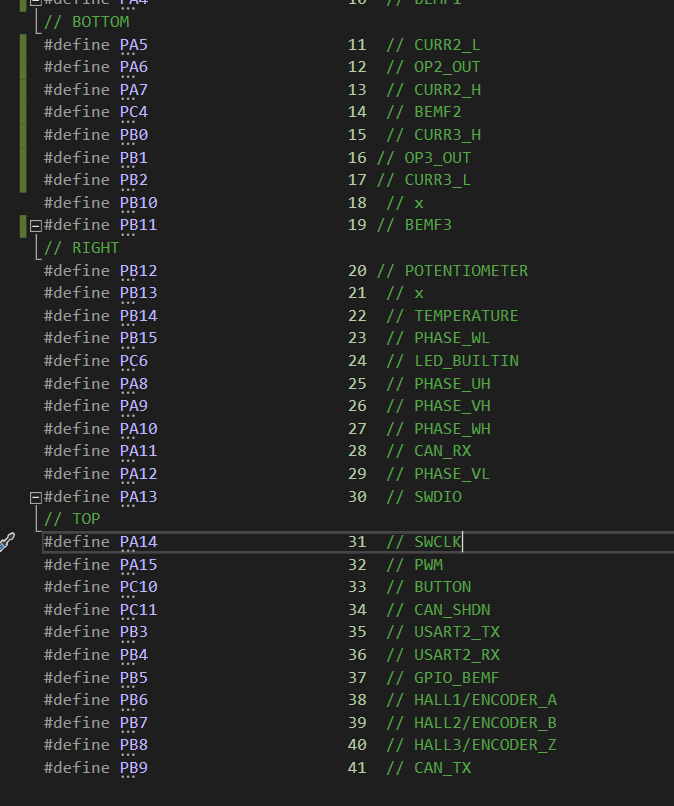
Do I have to use a function of the lib to get it working?
I need a way to control the motor externally. Therefore a analog pin or pwm pin would be great.
While I am here, can someone give me a link on how to setup the current sensoring or even better, how to setup and use the torque mode.
Don’t laugh at my code, I am a newby. xD
#include <SimpleFOC.h>
#include <Arduino.h>
float target = 5;
float speed = 2;
bool direction = false;
unsigned long previousMillis = 0, currentMillis = 0;
// BLDCMotor( pole_pairs )
BLDCMotor motor = BLDCMotor(15);
// BLDCDriver( pin_pwmA, pin_pwmB, pin_pwmC, enable (optional) )
BLDCDriver6PWM driver = BLDCDriver6PWM(A_PHASE_UH, A_PHASE_UL, A_PHASE_VH, A_PHASE_VL, A_PHASE_WH, A_PHASE_WL, true);
HallSensor sensor = HallSensor(A_HALL1, A_HALL2, A_HALL3, 15);
// Interrupt routine initialisation
void doA() { sensor.handleA(); }
void doB() { sensor.handleB(); }
void doC() { sensor.handleC(); }
void serialLoop() {
// This function is used to handle the inputs in the Serial window
static String received_chars;
while (Serial.available()) {
char inChar = (char)Serial.read();
received_chars += inChar;
if (inChar == '\n') {
target = received_chars.toFloat();
Serial.print("Target = "); Serial.println(target);
received_chars = "";
}
}
}
void Draw_Hall_Sensors(){
//This function is used to controll the Sensorinputs (use the Serial Plotter)
Serial.print(digitalRead(A_HALL1));
Serial.print(" ");
Serial.print(digitalRead(A_HALL2));
Serial.print(" ");
Serial.println(digitalRead(A_HALL3));
}
float Toggle_Delay(float variable, float first_value, float second_value, unsigned long interval_sec) {
currentMillis = millis();
if (currentMillis - previousMillis >= interval_sec*1000) {
previousMillis = currentMillis;
if (variable == first_value) {
variable = second_value;
}
else {
variable = first_value;
}
}
return variable;
}
void setup() {
pinMode(A_POTENTIOMETER,INPUT_ANALOG);
Serial.begin(115200);
delay(1000);
// initialize Sensor
sensor.init();
// Set Sensorinput as Interrupt
sensor.enableInterrupts(doA, doB, doC);
// power supply voltage [V]
driver.voltage_power_supply = 12;
// initialize driver
driver.init();
// link driver to the motor
motor.linkDriver(&driver);
// Set the voltage limit for each coil
motor.voltage_limit = 4; //[V]
// Set the velocity limit
motor.velocity_limit = 26; //[rad/s]
// Set the voltage limit for sensor alignment??
motor.voltage_sensor_align = 1;
// Link the Sensor to the Motor, now closed loop
motor.linkSensor(&sensor);
// Set the PID values for the controll loop
motor.PID_velocity.P = 1.0;
motor.PID_velocity.I = 10;
motor.PID_velocity.D = 0.0001;
motor.LPF_velocity.Tf = 0.05;
// Set control loop type to be used
motor.controller = MotionControlType::velocity;
// Set the Serial for monitoring the motor data
motor.useMonitoring(Serial);
// initialize motor
motor.init();
// initialitze the FOC algorithm
motor.initFOC(3.14, Direction::CW);
// Enable Motor and Driver
motor.enable();
driver.enable();
}
void loop() {
/*serialLoop();
motor.loopFOC();
speed = Toggle_Delay(speed, 0, 6, 5);
motor.move(speed);
Serial.print(sensor.getVelocity());
Serial.print("\t");
Serial.println(speed);
*/
Serial.print(analogRead(A_POTENTIOMETER));
Serial.print("\t");
Serial.println(pulseIn(A_POTENTIOMETER,HIGH));
}