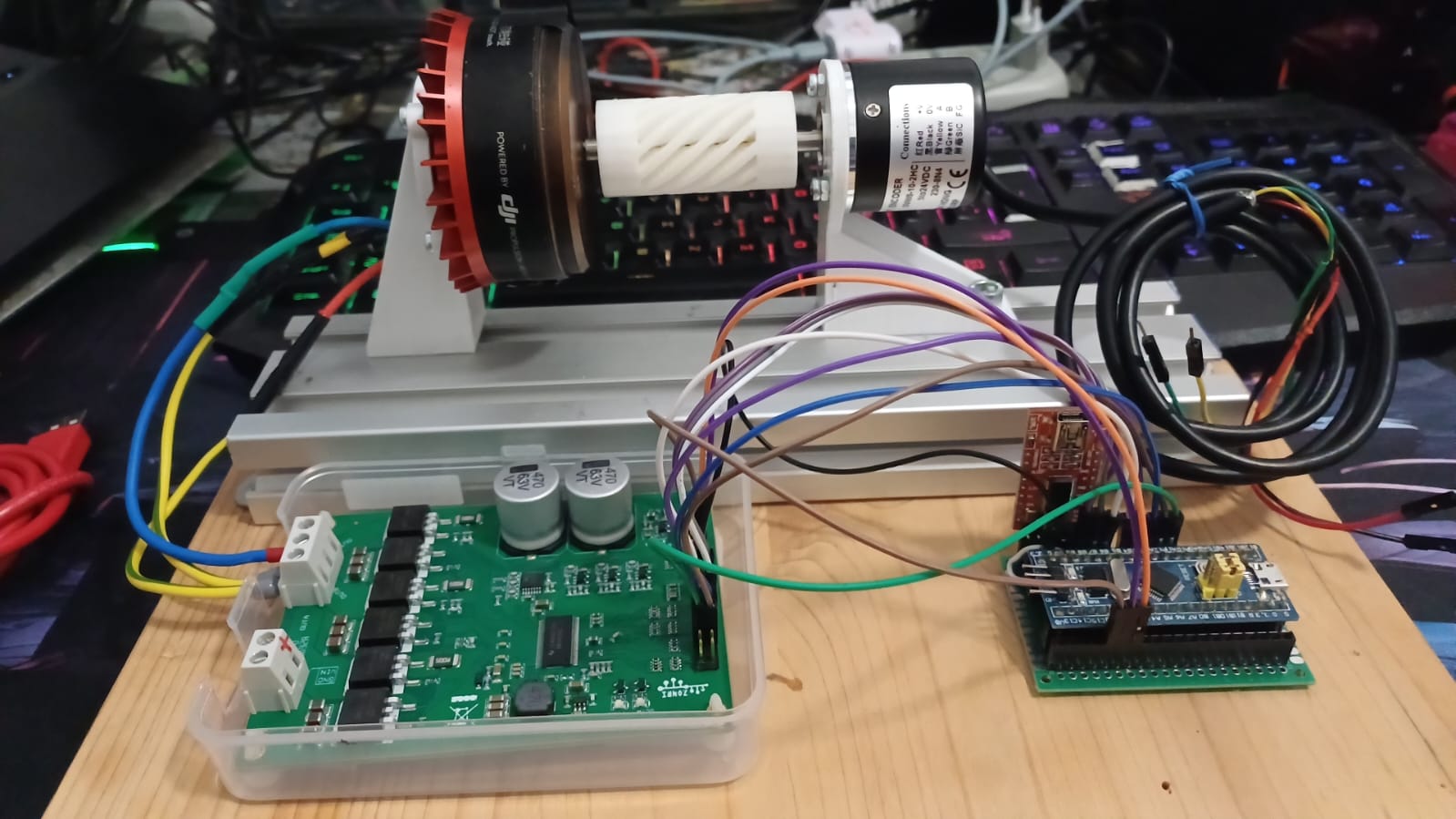
I managed to run the example codes for MotionControlType::velocity_openloop and MotionControlType::angle_openloop with the SimpleFOCMini board. I am new to this field, but based on my previous experiences, I expected it to be quite straightforward. However, it turned out to be more challenging than I anticipated. The setup I created is very fragile, and the driver board constantly goes into error mode. According to the DRV8313 specifications, it should be able to operate at currents between 2-2.5 amps, but it goes into fault mode when I exceed 0.7 amps on the power supply. To achieve this, I kept the motor.voltage_limit value between 1V and 1.5V. The DRV8313 chip does not have a current adjustment setting. What could be the cause of this fragility?
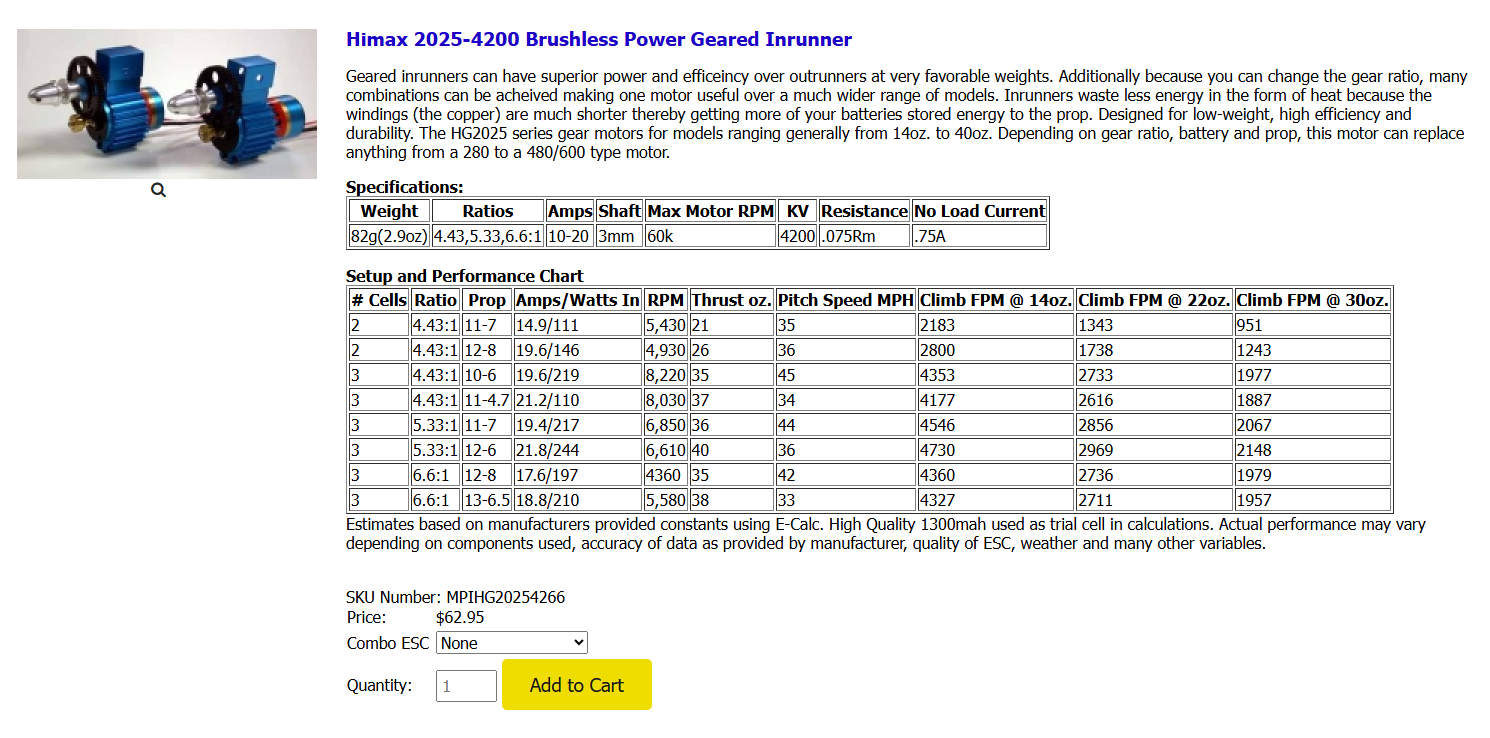
The motor is a small one designed for use in an RC-controlled airplane, so it’s not very large.
Do you have a link or a datasheet for the motor you’re using?
The PSU current is an indication, but its not a reliable measurement of the motor current. The motor current can be higher than the PSU current, and also the probably PSU can’t display short-term peaks.
I’m guessing the airplane motor has quite low phase resistance, so you’ll have to keep voltage limits low in open loop mode. In closed loop mode it will be much better, and with current control (if your board has current sensing) you’ll probably also get better results.
I have noticed that the current requirements change as the RPM speed varies (similar to stepper motors). Additionally, I have come to realize that using closed-loop control and FOC control makes more sense (a achievement unlocked for me). I will share the motor specifications once I get home this evening.
The DRV8313 board does not have a current sensor. However, I have a different motor and a different board that uses the DRV8302-based circuit. This setup includes a current sensor and offers a closed-loop infrastructure. I will continue my experiments with this configuration.
I bought this engine ten years ago. I could not find manufucturer. But I found similar motor. I found the pole pair number as 3 by returning 2 radians from the software.