Hi, one of my 24n22p gimbal motor got broken and now I’m trying to wind it all over again.
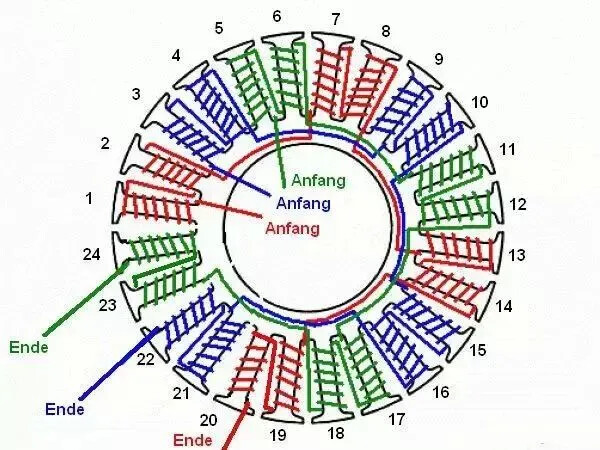
Initially the motor’s winding is AaAabBbBCcCcaAaABbBbcCcC, but I came across the following image.
ref:
https://www.x-teamrc.com/x-team-bldc-motors-stator-and-rotor-design-for-brushless-motors/
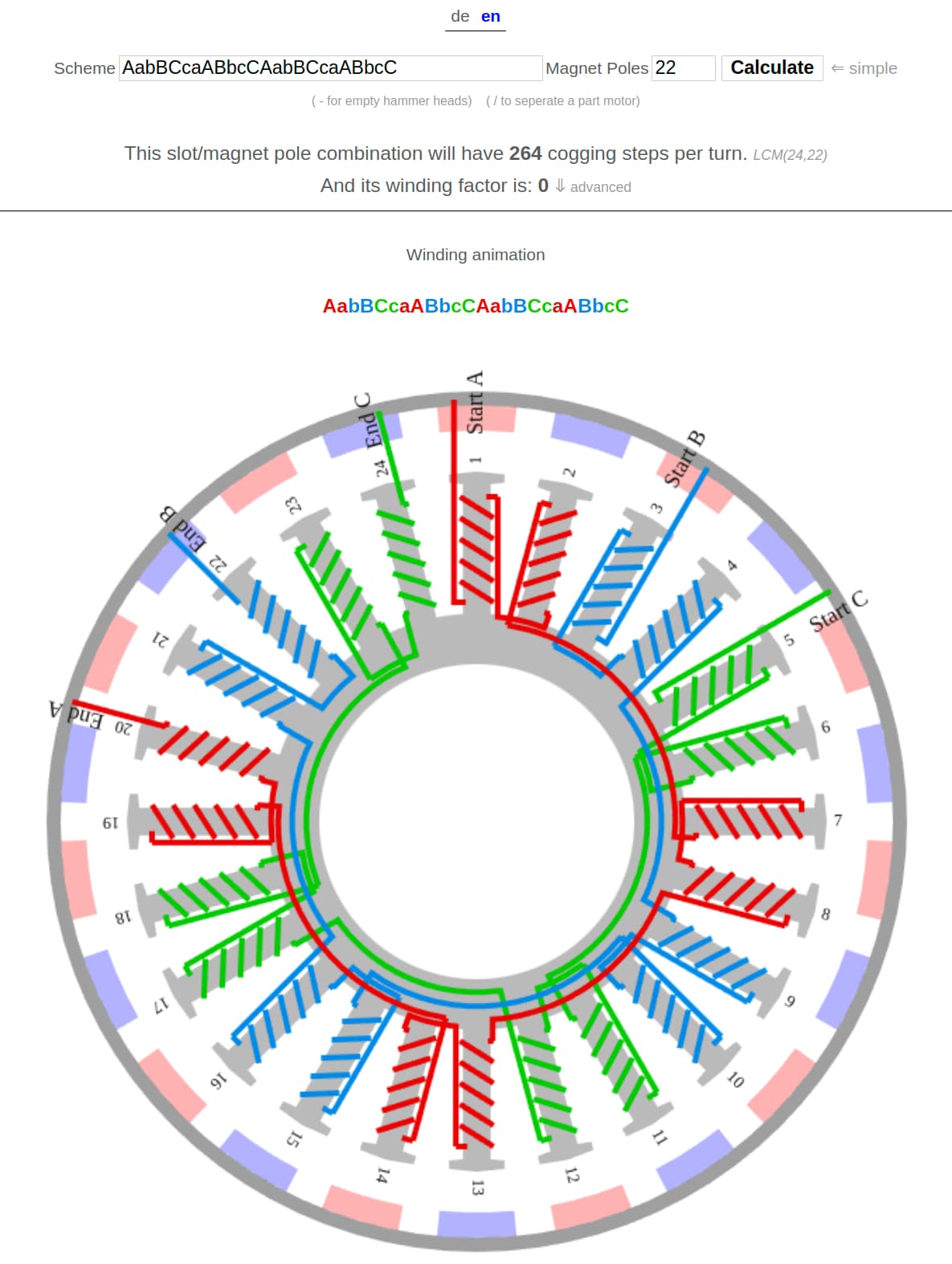
I assume this winding is AabBCcaABbcCAabBCcaABbcC and here is the result of winding scheme calculator.
It says the winding factor is 0, so maybe I shouldn’t try this, but just out of curiosity I wanted to know if this works with simplefoc library.
Here is the motor spces:
GBM5208-75T 24n22p 15.0Ω
0.22mm wire
There’s not much to be gained since the regular scheme has such a high winding factor already, but you could always do a test wind to see if it will run. Use fine wire and maybe 3 turns per tooth so it doesn’t take long or waste much, and test with a drone ESC. If it runs, you can redo it with large number of turns for your SimpleFOC setup, or go back to the original scheme.
I was always confused about these 24n22p motors.
In my book 24n20p would make more sense?!
Just check out the red coil: 1/2 and 13/14 are aligned nicely, but the other two pairs are way off.
That might be a trick to reduce cogging, but it’s a huge waste of energy, right?