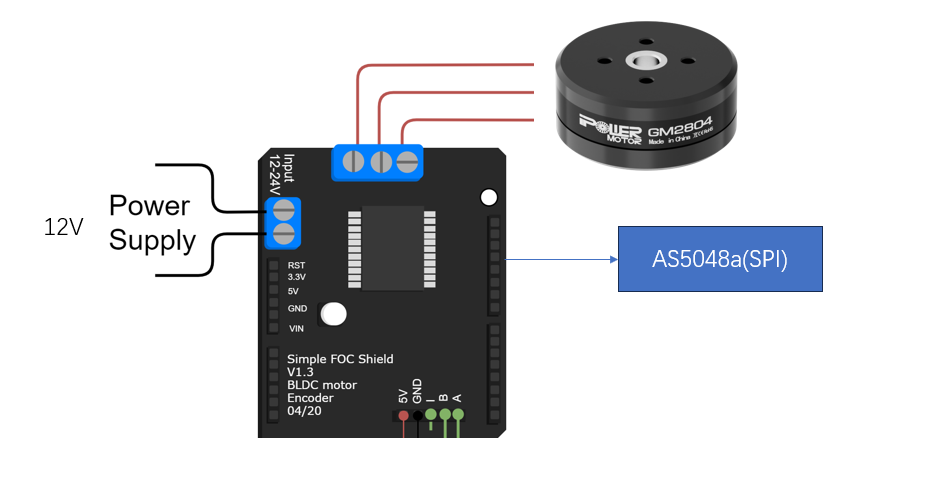
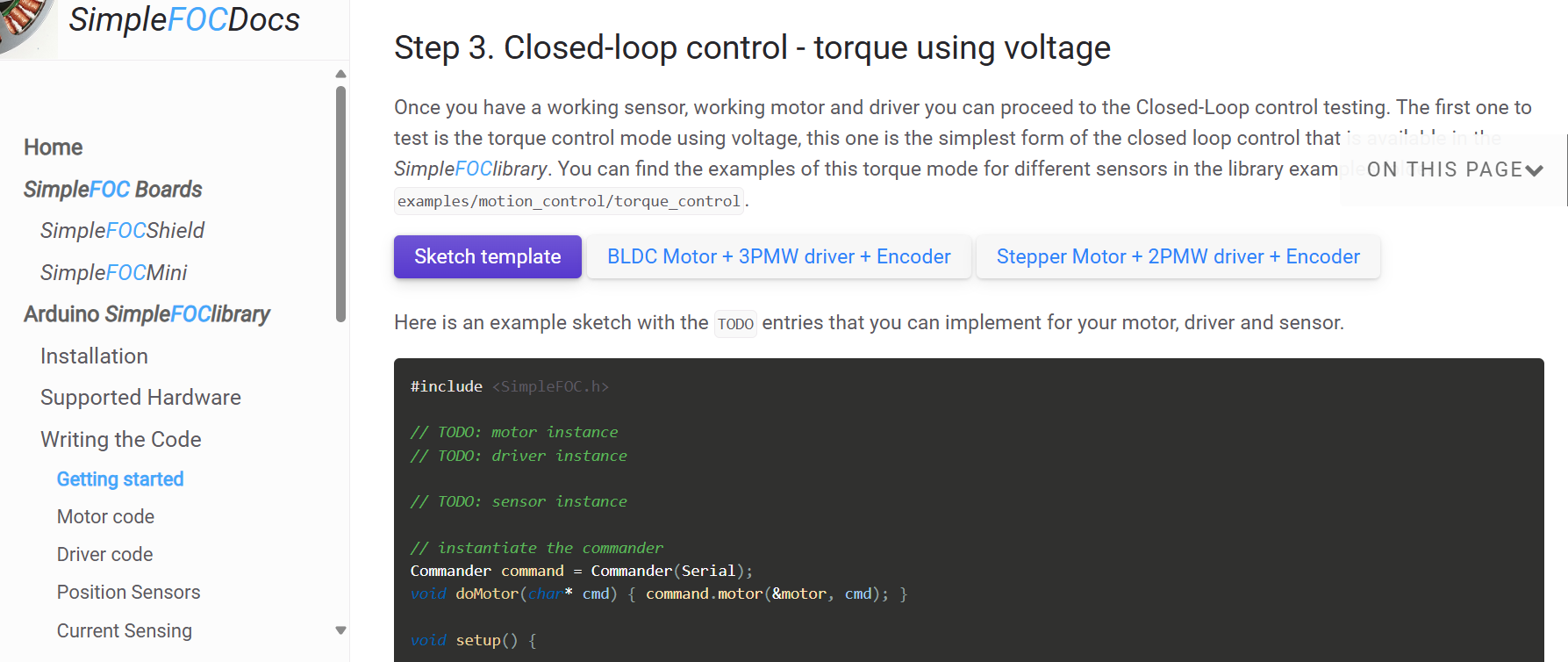
Here is my code and my system:
#include <SimpleFOC.h>
// BLDC motor & driver instance
BLDCMotor motor = BLDCMotor(7);
BLDCDriver3PWM driver = BLDCDriver3PWM(9, 5, 6, 8);
// encoder instance
MagneticSensorSPI encoder = MagneticSensorSPI(AS5048_SPI, 10);
// instantiate the commander
Commander command = Commander(Serial);
void doMotor(char* cmd) { command.motor(&motor, cmd); }
void setup() {
// use monitoring with serial
Serial.begin(115200);
// enable more verbose output for debugging
// comment out if not needed
SimpleFOCDebug::enable(&Serial);
// initialize encoder sensor hardware
encoder.init();
// link the motor to the sensor
motor.linkSensor(&encoder);
// driver config
// power supply voltage [V]
driver.voltage_power_supply = 12;
// driver init
if(!driver.init()){
Serial.println("Driver init failed!");
return;
}
// link driver
motor.linkDriver(&driver);
// aligning voltage
motor.voltage_sensor_align = 5;
// set motion control loop to be used
motor.torque_controller = TorqueControlType::voltage;
motor.controller = MotionControlType::torque;
// comment out if not needed
motor.useMonitoring(Serial);
// initialize motor
if(!motor.init()){
Serial.println("Motor init failed!");
return;
}
// align sensor and start FOC
if(!motor.initFOC()){
Serial.println("FOC init failed!");
return;
}
// set the initial motor target
motor.target = 2; // Volts
// add target command M
command.add('M', doMotor, "Motor");
Serial.println(F("Motor ready."));
Serial.println(F("Set the target using serial terminal and command M:"));
_delay(1000);
}
void loop() {
// main FOC algorithm function
motor.loopFOC();
// Motion control function
motor.move();
// user communication
command.run();
}
I ran the “getting start” section right but got wrong in the step3:
when I monitored the arduino, it seemed normal because it initialized right:
MOT: Monitor enabled!
MOT: Init
MOT: Enable driver.
MOT: Align sensor.
MOT: sensor_direction==CCW
MOT: PP check: OK!
MOT: Zero elec. angle: 3.40
MOT: No current sense.
MOT: Ready.
Motor ready.
Set the target using serial terminal and command M:
but when I input “MC1”(which means changing the system to “vel” model as the guide says):
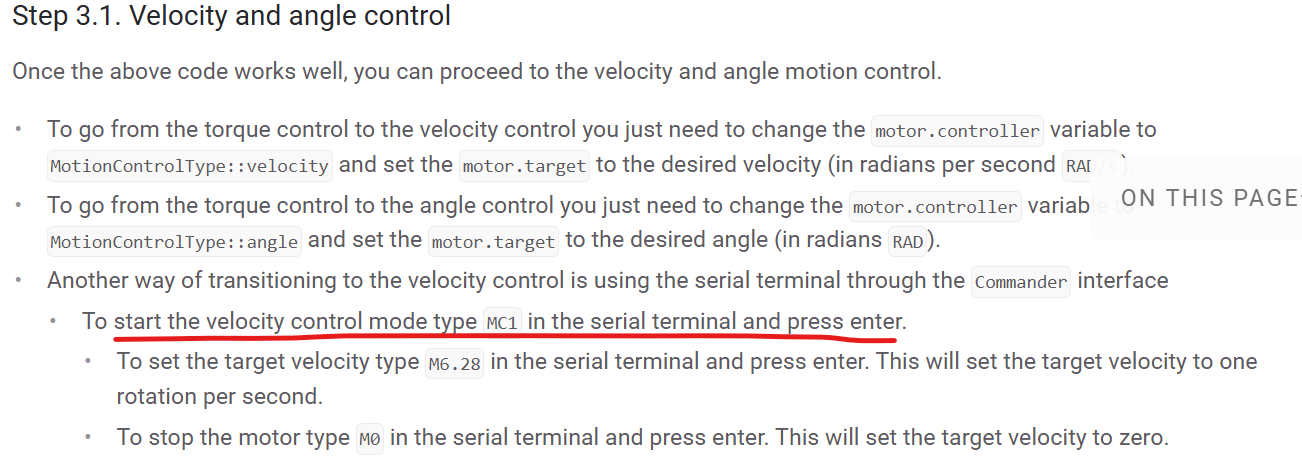
The motor vibrates so violently that it “scurries” around the table. Why?