Hi @runger , you think your suggestion from this post (Link) would work for this driver also? (using 3-PWM will enable pins?) The only thing is I don’t know if SimpleFOC will switch-On and switch-OFF the enable pins along with the HIN pins simultaneously?
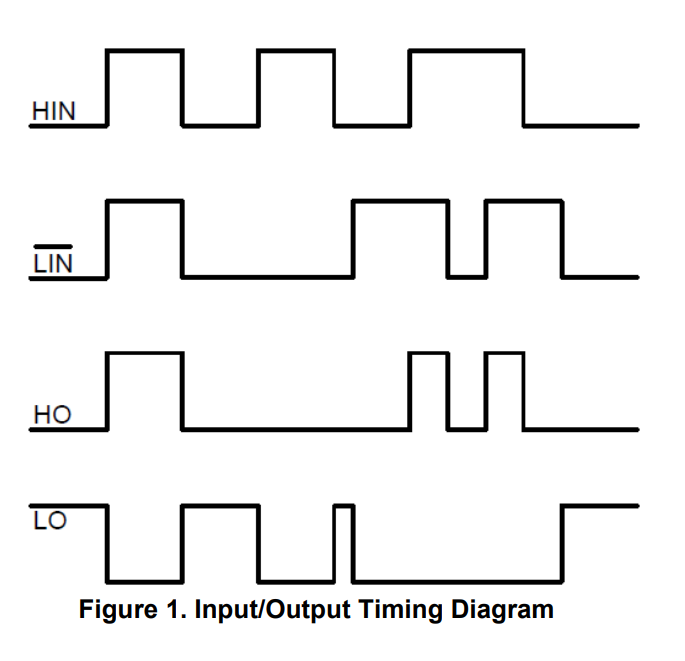
Below is the timing diagram of the IR2103 for reference.