Hello everyone.
I have a LA052 motor connected to an IHM07MI driver board
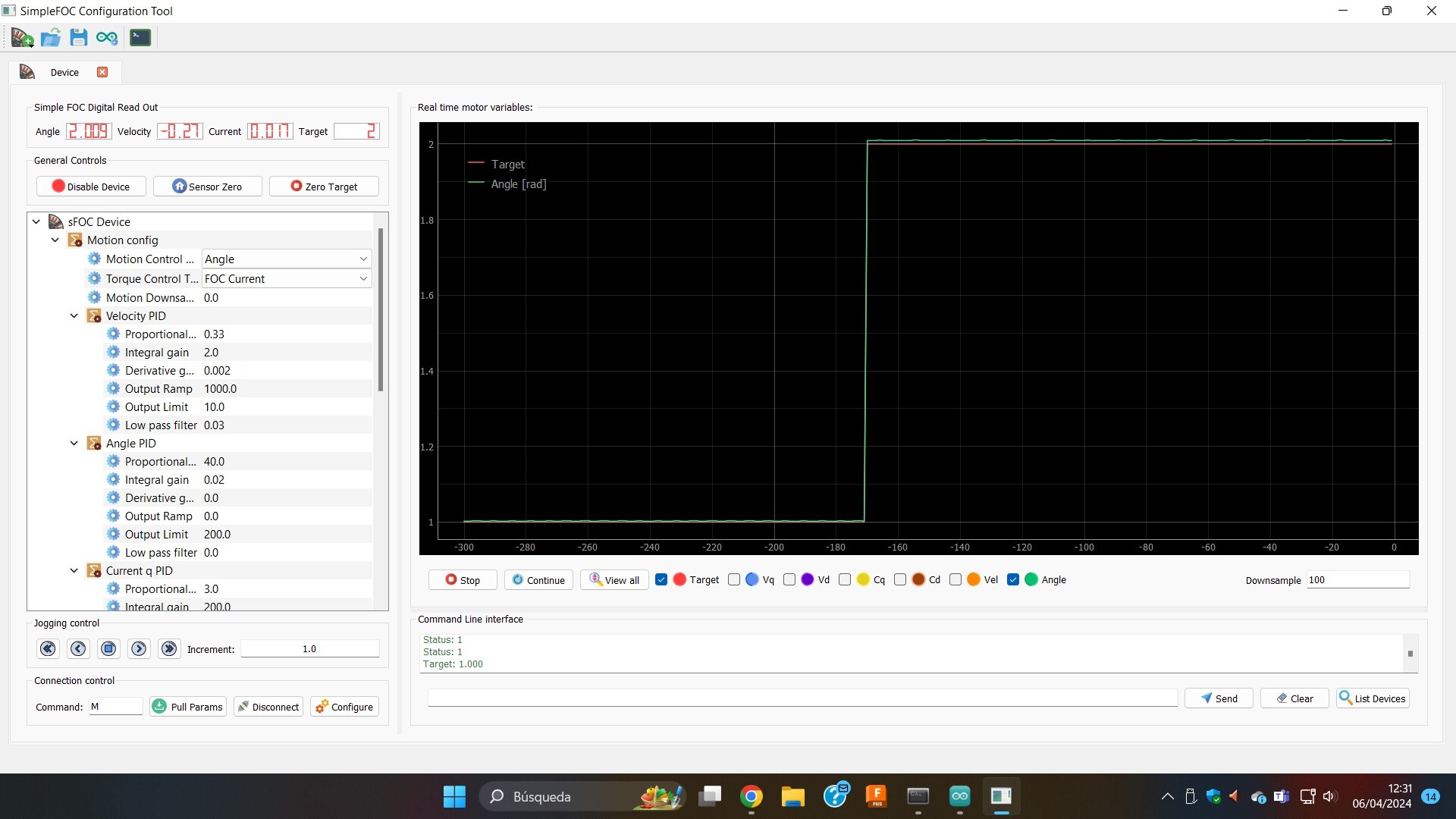
It is configured as a position control loop.
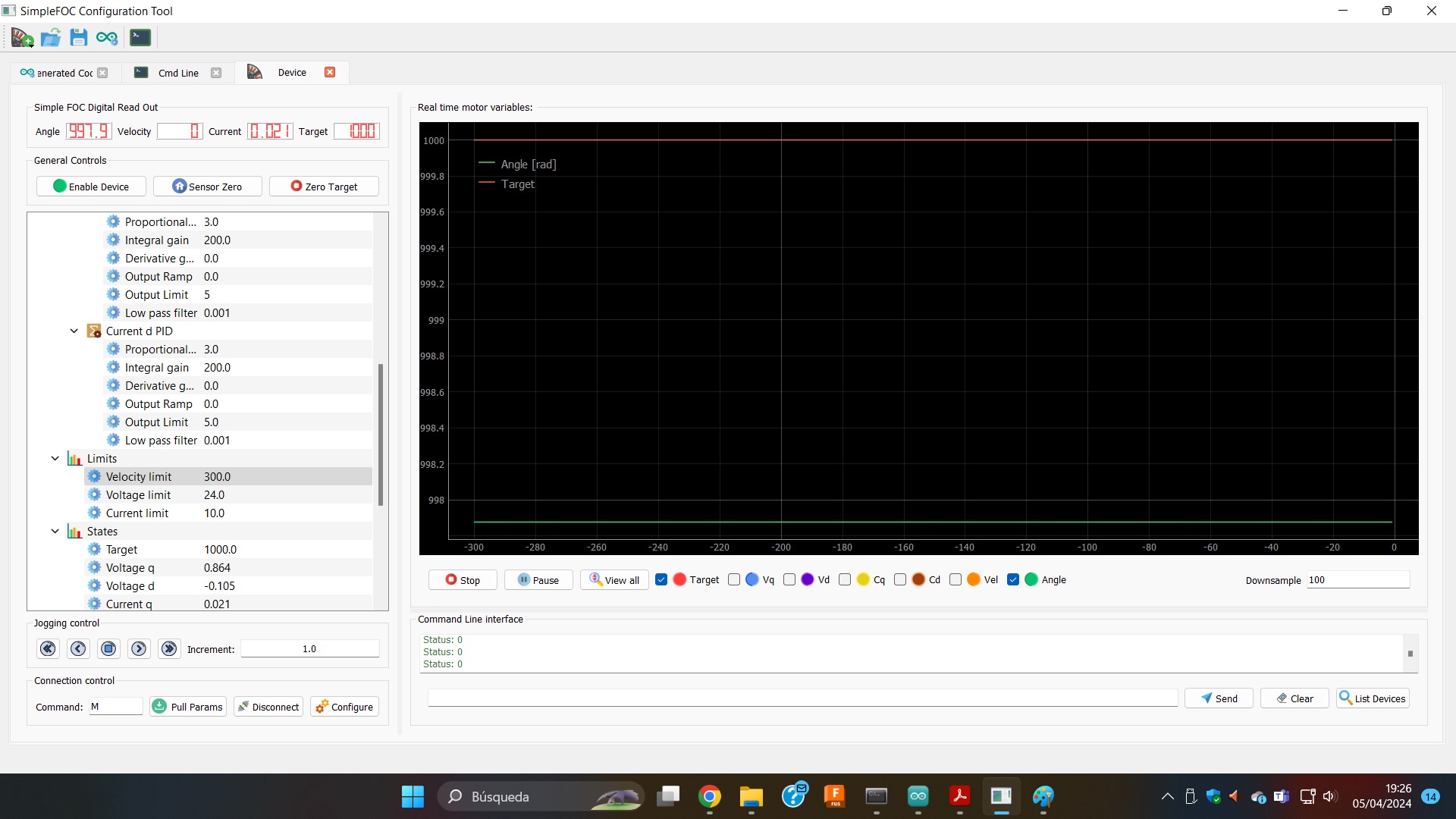
I’ve been fussing with the PID values and I finally get it to work without oscillations (for small displacement values). But I find that when I set the target to a high value of 1000. The motor moves to a value of 998 and remains with that error value (of 2 units).
By setting the target back to 0, the error value is now -3. The angle being -3 and the target 0.
What could be happening? I do not know how to start. Some suggestion.
Thank you all for your time.